光电编码器在电机控制中的应用

光电编码器在电机控制中可以用来测量电机转子的磁场位置和机械位置以及转子的磁场和机械位置的变化速度与变化方向。下面就我就光电编码器在这几方面的应用方法做一下介绍。
(一)、使用光电编码器来测量电机的转速
可以利用定时器/计数器配合光电编码器的输出脉冲信号来测量电机的转速。具体的测速方法有M法、T法和M/T法3种。
M法又称之为测频法,其测速原理是在规定的检测时间Tc内,对光电编码器输出的脉冲信号计数的测速方法,如图2所示,例如光电编码器是N线的,则每旋转一周可以有4N个脉冲,因为两路脉冲的上升沿与下降沿正好使编码器信号4倍频。现在假设检测时间是Tc,计数器的记录的脉冲数是M1,则电机的每分钟的转速为
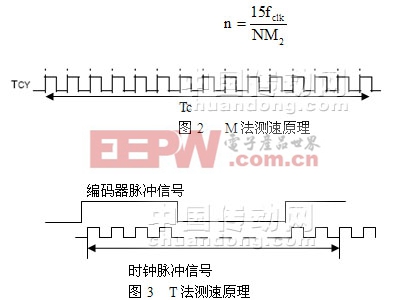
在实际的测量中,时间Tc内的脉冲个数不一定正好是整数,而且存在最大半个脉冲的误差。如果要求测量的误差小于规定的范围,比如说是小于百分之一,那么M1就应该大于50。在一定的转速下要增大检测脉冲数M1以减小误差,可以增大检测时间Tc单考虑到实际的应用检测时间很短,例如伺服系统中的测量速度用于反馈控制,一般应在0.01秒以下。由此可见,减小测量误差的方法是采用高线数的光电编码器。
M法测速适用于测量高转速,因为对于给定的光电编码器线数N机测量时间Tc条件下,转速越高,计数脉冲M1越大,误差也就越小。
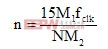
T法也称之为测周法,该测速方法是在一个脉冲周期内对时钟信号脉冲进行计数的方法,如图3所示。例如时钟频率为fclk,计数器记录的脉冲数为M2,光电编码器是N线的,每线输出4N个脉冲,那么电机的每分钟的转速为
为了减小误差,希望尽可能记录较多的脉冲数,因此T法测速适用于低速运行的场合。但转速太低,一个编码器输出脉冲的时间太长,时钟脉冲数会超过计数器最大计数值而产生溢出;另外,时间太长也会影响控制的快速性。与M法测速一样,选用线数较多的光电编码器可以提高对电机转速测量的快速性与精度。
M/T法测速是将M法和T法两种方法结合在一起使用,在一定的时间范围内,同时对光电编码器输出的脉冲个数M1和M2进行计数,则电机每分钟的转速为
实际工作时,在固定的Tc时间内对光电编码器的脉冲计数,在第一个光电编码器上升沿定时器开始定时,同时开始记录光电编码器和时钟脉冲数,定时器定时Tc时间到,对光电编码器的脉冲停止计数,而在下一个光电编码器的上升沿到来时刻,时钟脉冲才停止记录。采用M/T法既具有M法测速的高速优点,又具有T法测速的低速的优点,能够覆盖较广的转速范围,测量的精度也较高,在电机的控制中有着十分广泛的应用。








评论