交流电机直接转矩控制改进方案

随着现代电力电子、微电子技术和控制理论的发展,交流调速性能日益完善,足以和直流调速媲美,广泛应用于工农业生产、交通、国防和日常生活。高性能的交流调速系统中主要有矢量控制和直接转矩控制两种。直接转矩控制是由德国的Depenbrock教授于1985年提出的。近年来,结合智能控制理论与直接转矩控制理论,提出诸多基于模糊控制和人工工神经网络的直接转矩控制系统,进一步提高其控制性能。目前它已成为各种交流调速方法中研究最多、应用前景最广的交流调速方法之一。
2 直接转矩控制基本原理
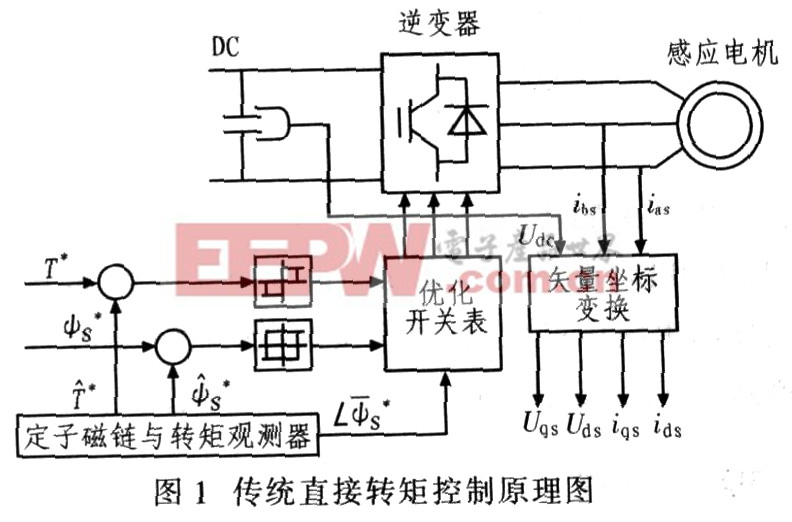
直接转矩控制原理是利用测得的电流和电压矢量辨识定子磁链和转矩,并与磁链和转矩给定值相比较,将其差值输入两个滞环比较器,然后根据滞环比较器的输出和磁链位置从开关表中选择合适的电压矢量,进而控制转矩。其原理框图如图1所示。
交流电机的转矩表达式如下:
![]()
式中:δ为定、转子磁链夹角,np为极对数。
转子磁链和定子磁链之间存在一个滞后惯性环节,当定子磁链改变时,认为转子磁链不变。因此,从式(1)知道,如果保持定子磁链的幅值恒定,通过选择电压矢量,使定子磁链走走停停,改变定子磁链的平均旋转速度,从而改变定、转子磁链夹角,就能够实现对转矩的控制。从这里看,直接转矩控制的关键在于如何保持定子磁链恒定和改变磁链夹角。直接转矩控制自提出以来,各国学者对其进行不断改进,完善性能。这些方案虽然方法不同、原理各异,但都是期望选取适当电压矢量来保证磁链的圆形轨迹,从而减小脉动。
3 直接转矩控制改进方案
3.1 改进磁链辨识方法
直接测量定子磁链很麻烦而且成本很高,通常采用一些容易得到的变量(如U、I)来进行估算。常用的模型有U-I,模型、I-n模型和混合U-n模型。U-I模型表达式如下:
![]()
它简单易实现,常用在高速场合,但采用纯积分器,因此存在累计积分误差、漂移和饱和等问题,文献[2]给出一种低通滤波器取代纯积分器,并对其进行补偿,取得较好效果。低速时,直接转矩控制系统中磁链、转矩脉动较大。此时,定子电阻压降所占比例增大,不能忽略,经U-I,模型会产生误差,从而导致磁链和转矩脉动。采用精确辨识定子电阻来补偿其压降。当定子电阻压降得到合适的补偿,就能有效建立定子磁链,从而产生电磁转矩。其他还有一些智能技术,如神经网络、模糊技术也用于辨识定子电阻,具有良好效果。磁链辨识不精确,产生磁链转矩误差,从而选择错误的电压矢量,最终导致磁链和转矩脉动。有时未采用识别定子电阻,而是直接对磁链进行补偿以减小误差,这样就能从DTC开关表选择正确的电压矢量来减小转矩和定子磁链的误差,并逐渐减小速度误差到零。这两种方法可谓殊途同归。
3.2 细分滞环比较器容差
Bang-Bang控制是直接转矩控制系统的重要特点之一。通常磁链、转矩滞环比较器由施密特触发器构成,分别采用两层和3层结构。由于滞环控制器固有的特性,导致转矩波动过大,影响其在高精度交流伺服控制系统中的应用。文献[3]提出采用两级容错的滞环比较器结构,它与传统的调节器相比,可多输出8种状态,以开关表包含更多的磁链和转矩状态信息,更加细化了系统的运行特征,从而增强控制效果。文献[4]提出采用三点式转矩调节器,结合两点式磁链调节器,每个区间有4个工作电压矢量和2个零矢量,比传统方案多2个工作电压矢量,以此获得近圆形的磁链。当然也可以用PI取代转矩滞环控制器。其控制原理为:根据给定转矩与电机模型估计出转矩之差,经PI调节后得到电机的转差角速度,结合电机转速计算出一个控制周期内定子磁链的角度增量。由于当前控制周期内的磁链矢量是已知量,从而实现对电机转矩和磁链控制的目的。文献[5]提出注入抖动法,在转矩和磁链滞环内叠加一个高频三角波,其幅值和滞环容差宽度相当,根据反馈值、△ψ和载波比较,根据差值来选择适当的电压矢量。三角波频率增大.开关频率也就得到提高。容差分级没有一个明确的概念,是一个模糊量,因此文献[6]引入模糊控制的概念,用模糊控制器取代滞环比较器和开关表,通过区分不同磁链误差和转矩误差大小,做出不同决策来优化开关状态的选取,从而改善系统性能。而在采用SVM技术的直接转矩控制系统中,由于是根据每个控制周期的磁链和转矩偏差来合成电压空间矢量,因此不再需要滞环比较器和开关表(可抽象看成将容差分为无限细。
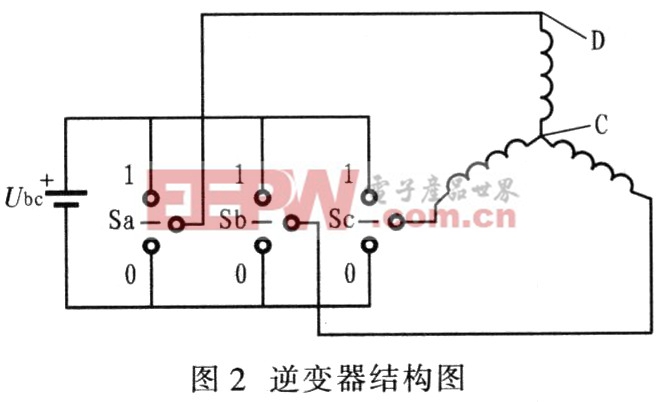
3.3 增加逆变器输出状态
在传统的直接转矩控制系统中,通常采用三相两点式逆变器.其结构如图2所示。






评论