基于矢量控制的永磁同步电机调速系统研究

近年来,随着电力电子技术、微电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机得以迅速推广应用。永磁同步电机具有体积小、损耗低、效率高等优点,在节约能源和环境保护日益受到重视的今天,对它的研究就显得更有必要。
1 永磁同步电机的数学模型
为了便于分析,在建立数学模型时常忽略一些影响较小的参数,做如下假设:
(1)忽略电动机铁心的饱和;
(2)不计电动机中的涡流和磁滞损耗;
(3)定子和转子磁动势所产生的磁场沿定子内圆是按正弦分布的,即忽略磁场中的所有空间谐波;
(4)各相绕组对称,即各相绕组的匝数和电阻相同,各相轴线相互位移同样的电角度。
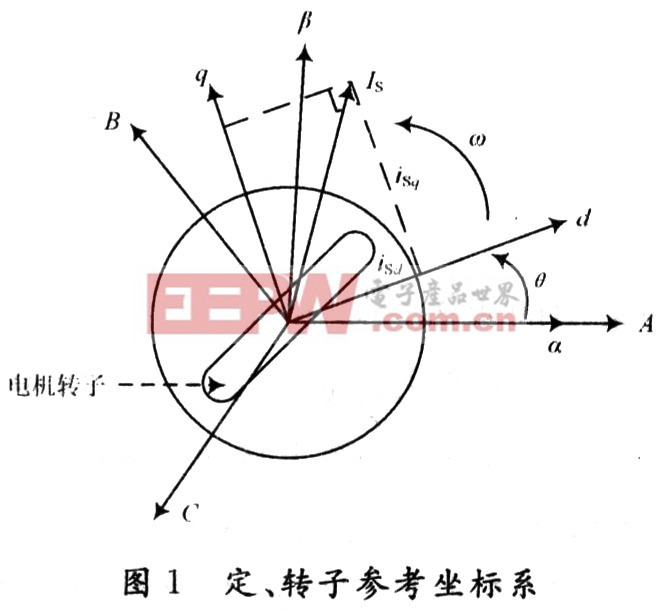
在分析同步电机的数学模型时,常采用坐标变换的方式,常用的坐标系有两相同步旋转坐标系为dq坐标系和两相静止坐标系为αβ坐标系。故可以得到永磁同步电动机在幽旋转坐标系下(见图1)的数学模型为:
若电机为隐极电机,即Ld=Lq,选取定子电流id,iq及电机机械角速度ω为状态变量,可以得到永磁同步电机的状态方程如下式所示:

从上式中可以发现,三相永磁同步电机是一个多变量系统,而且id,iq,ω之间存在着非线性耦合关系,要想实现对三相永磁同步电机的高性能控制,是一个颇具挑战性的课题。
2 永磁同步电机矢量控制
高性能的交流调速系统需要现代控制理论的支撑,对于交流电机,目前使用最广泛、并已经在实际系统中应用的当属矢量控制理论。1971年,由F.Blaschke教授提出的矢量控制理论,矢量控制基本原理是:以转子磁链这一旋转空间矢量为参考坐标,将定子电流分解为相互正交的2个分量,一个与磁链同方向,代表定子电流励磁分量,另一个与磁链方向正交,代表定子电流转矩分量,然后分别对其进行独立控制,获得像直流电机一样良好的动态特性。永磁同步电机数学模型经过坐标变换后,id,iq之间仍存在着耦合,不能实现对id和iq的独立调节。如果要获得永磁同步电机良好的动、静态性能,就必须解决id,iq电流的解耦问题。如能控制id=0,则永磁同步电机的状态方程式可以简化为:

此时id,iq无耦合关系,Te=npψfiq,可以通过独立调节iq实现转矩的线性化控制。
3 基于PI控制的永磁同步电机算法
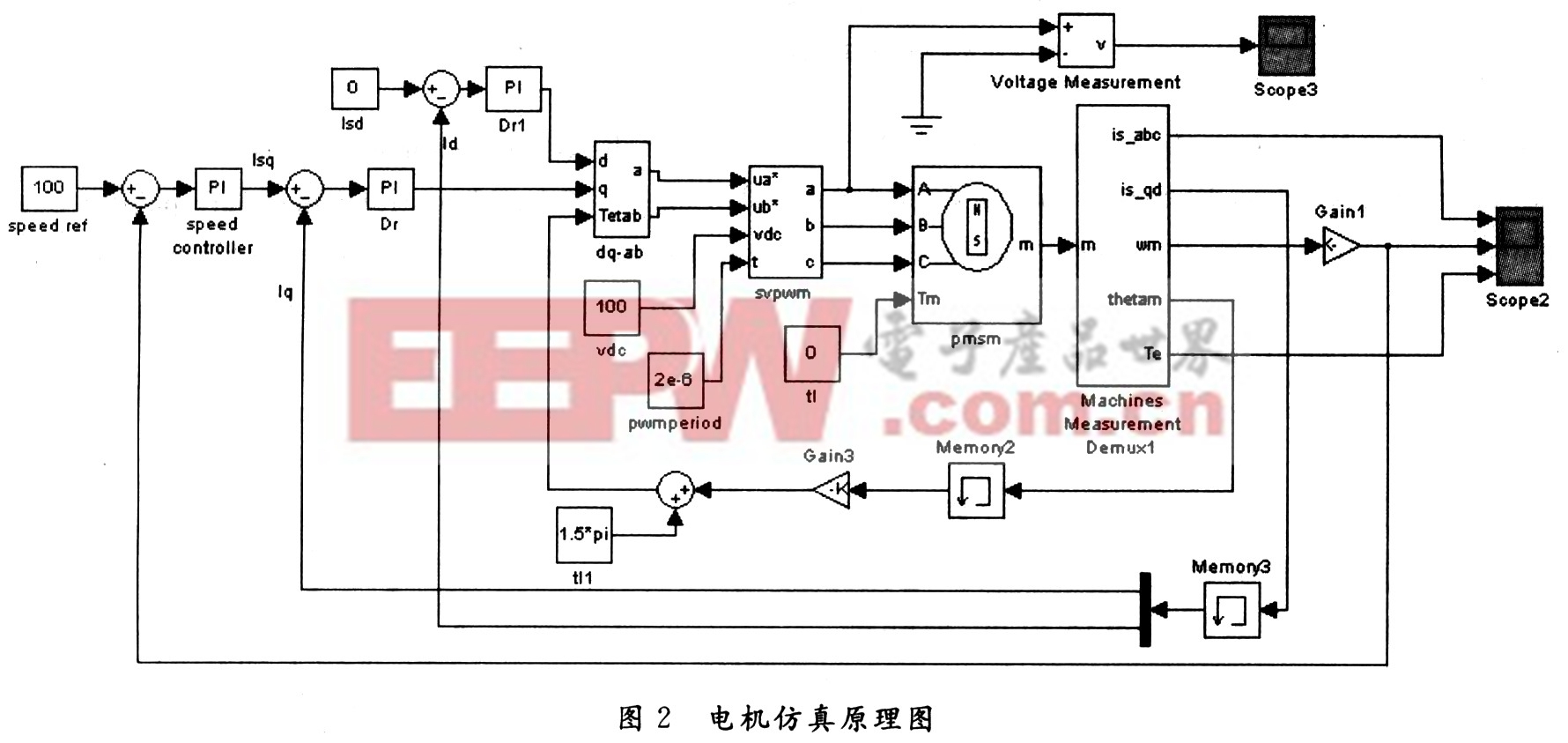
在Matlab/Simulink中搭建了采用PI控制的永磁同步电机交流调速系统的仿真模型,进行仿真研究,电流环、速度环均采用工程领域广泛使用的PI控制,来验证系统采用PI控制的效果,仿真原理图如图2所示。
仿真中采用的永磁同步电机参数如下:RS=1.9 Ω,Ld=Lq=0.01 H,转子永磁磁链ψf=0.353 Wb,转动惯量J=7.24×10-4kg・m2,额定转速为3 000 r/min,额定转矩为4 N・m,额定电流为3.3 A。
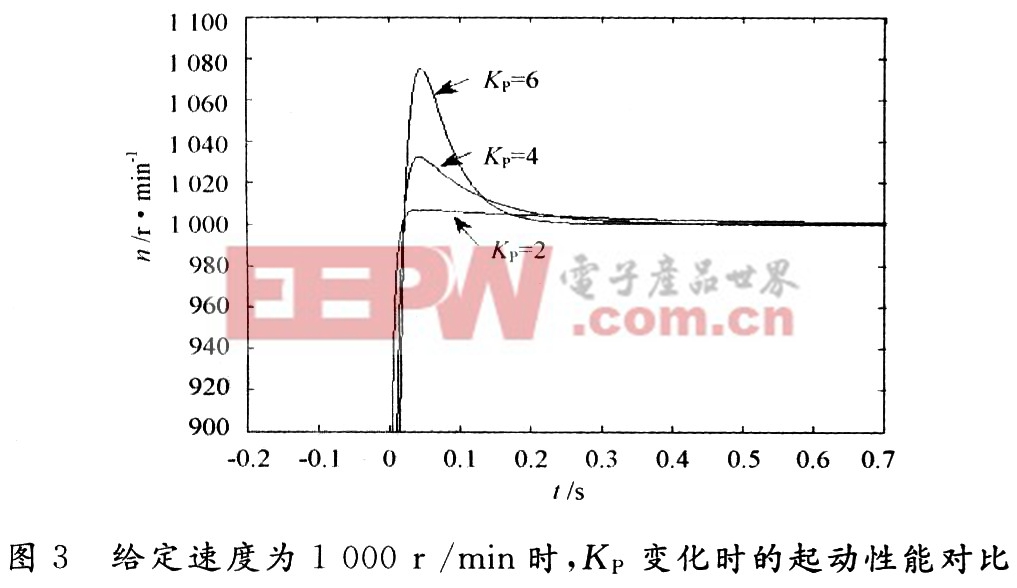
首先,考查PI控制器中增益P对系统性能的影响。在PI控制器中,我们固定积分增益K1=10,比例增益Kp=2,4,6变化时,分别测试电机在给定速度为1 000 r/min下的动态曲线,得出对比效果见图3,图4。












评论