一种新型极低速异步电机无速度传感器控制方法

1引言
本文引用地址:https://www.eepw.com.cn/article/163455.htm近年来,异步电机的无速度传感器矢量控制成为研究热点。目前,异步电机无速度传感器矢量控制在中高速段已获得良好的控制性能,但在极低速段(1Hz)却仍未实现良好的控制。这是因为常用的异步电机无速度传感器矢量控制方法需要利用反电势,而反电势在极低速时很小,受采样精度和电机参数变化影响较大,导致控制性能降低,无法实现极低速段的无速度传感器矢量控制。
为了实现极低速段的异步电机无速度传感器控制,研究人员提出了各种控制方法。其中研究较多的是高频信号注入法,利用注入的高频定子电压信号产生的电流响应来估计转子位置[1]-[5]。这些基于高频信号注入的方法都利用了异步电机的非理想特性,如转子凸极、齿槽效应及饱和效应等。但是,这些基于高频信号注入的方法存在一个共同的缺点,即高频响应信号常常与其他高频谐波混合在一起,较难分离。需要采用复杂的信号处理方法获得所需高频响应信号,从而降低了系统响应速度,增加了控制系统的复杂性。此外,由于基于高频信号注入的方法利用了异步电机的非理想特性,因此受电机结构影响较大,缺乏一定的通用性。
为避免上述高频信号注入法所固有的各种问题,本文提出了一种基于低频信号注入的方法。该方法将文献[5]中的高频谐波信号变为低频谐波信号,通过注入低频d轴定子电流信号,利用产生的角度误差估计电机转速。该方法仅利用异步电机的基波模型,不依赖各种非理想特性,所以不受异步电机结构影响,具有普遍的适用性。此外,该方法所需低频响应信号容易分离,消除了高频信号注入法信号分离难的缺点,而且对电机参数具有较强的鲁棒性,无须进行参数估计,使得控制系统结构相对简单。仿真及实验结果证明,本文提出的基于低频信号注入的方法可以很好地实现极低速段异步电机无速度传感器矢量控制。
2低频信号注入法原理
由异步电机数学模型及运动方程可知,异步电机的电磁转矩可表示为: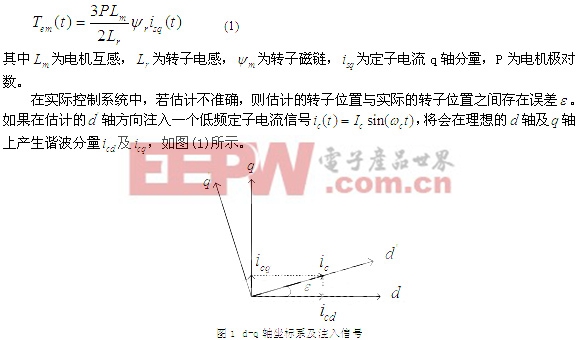


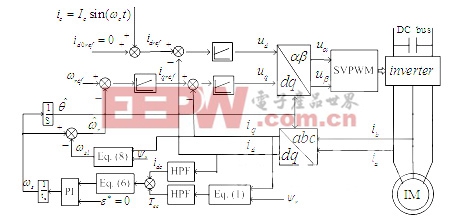
图2低频信号注入法系统控制原理框图
3电机参数鲁棒性分析
由上述分析可知,本文提出的低频信号注入法仅与注入信号及其引起的转矩响应有关,而与异步电机的定子电阻和转子电阻无关,因此对定转子电阻有很好的鲁棒性。
此外,由于在滑差转速计算中用到了转子时间常数,因此的变化会影响到估计转速的准确性。尽管如此,由于在同步转速估计中并未用到转子时间常数,所以的变化对转子磁链角度的估计没有影响。因此,本文的方法对转子时间常数也具有良好的鲁棒性。












评论