基于模糊控制的水下潜器沉浮控制方法

摘要:针对水下潜器实际工作的需求和水下沉浮运动特征,提出一种基于自适应模糊控制的水下潜器自主沉浮控制方法。该方法从优化隶属函数入手,采用多层前向神经网络的误差反向传播(EBP)算法对它的参数进行在线修正,并采用Delta-Bar-Delta学习规则对学习速率进行在线调整,使EBP算法具有较快的收敛速度,同时避免了局部极小值问题。仿真实验表明,对于水下潜器自主沉浮运动的不能精确建摸、干扰严重的非线性与时变情况,这种自适应模糊控制是一种较好的控制方式。
关键词:模糊控制;自主沉浮;隶属函数;神经网络
水下潜器在作业使用时,为了自身的结构安全以及保持深度稳定性,要求有良好的自主沉浮控制能力。水下潜器由于惯性较大,在水下的低速运动表现为耦合非线性。因此,水下潜器自主沉浮控制系统是一种惯性大、时滞、非线性的复杂控制系统。常规的PID控制方法。要求水下潜器的动力学特性是已知的,同时应该保持不变,尤其是外界的扰动要尽可能小,主要由人工凭经验根据水下潜器的重量、排水、沉浮速度及海况等诸因素调整各参数。但实际情况中海洋环境的特殊性和多变性,使得常规的PID方法有很大的局限性,运用效果不好。模糊控制是一种适用于难以用精确数学模型描述而主要依赖人工经验的复杂控制方法,因此人们纷纷研究将模糊控制应用到各种航器的操纵控制中。但一般的模糊控制器因属于PD控制,缺少积分环节,并且其模糊规则一经确定就不再改变,在无干扰的情况下,可以获得较好的控制效果,当环境条件发生变化时,控制效果就显得不够理想。
文中针对实际要求,提出一种基于自适应模糊控制的水下潜器自动沉浮控制方法。由于模糊控制器的隶属函数与模糊控制规则的选取对控制效果影响最大,该方法从优化隶属函数入手,采用多层前向神经网络的误差反向传播(EBP)算法对它的参数进行在线修正,采用Delta-Bar-Delta学习规则对学习速率进行在线调整,使EBP算法具有较快的收敛速度,同时避免了局部极小值问题。仿真实验表明,对于水下潜器自动沉浮与定深潜伏运动的不能精确建摸、干扰严重的非线性、时变情况,这种自适应模糊控制是一种较好的控制方式。
1 潜器水下自主沉浮控制系统工作原理
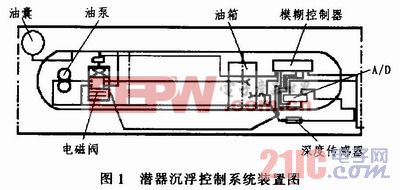
潜器沉浮控制系统装置如图1所示,主要由油箱、油泵、电磁阀、油囊及相关的电子控制器、传感器,模糊转换电路、电源组成。装置浮力调节的控制原理是用油泵将油箱的油充到油囊中去,油囊膨胀,从而使反潜器排水体积增加,其浮力增加。反之,将油囊中的油抽回油箱中,则其浮力将减小。正负浮力的改变从而使反潜器上浮或下沉。
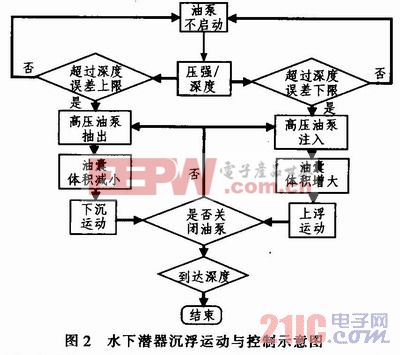
设想的潜器定深与沉浮运动的过程描述如图2所示。所构想的初始技术指标为:定深误差在定深指标的5%以内,即在2 000 m定深处上下沉浮不能超出100 m。这样就要求高压油泵的工作深度要达到2 100 m以上,并留出50~100 m的设计裕度。油囊高压泵的抽放油速率设计以及油囊的大小,一方面根据要求的反潜器定深动作反应速率和油囊体积变化时滞来参考,另一方面这些性能参数也依赖于实验精确测定,为油囊充放油控制提供参数。















评论