基于Modbus协议与MCX314的自动钻孔系统设计

摘要:Modbus协议由于其开放性、透明性、成本低、易于开发等优点,在工业领域被广泛使用。MCX314运动控制芯片具有高精度的可控性以及接口简单、编程方便等特点,因此在工业生产中常被用于伺服电机的精确控制。介绍了Modbus串口协议的通信原理以及MCX314运动控制芯片的应用,并结合两者开发出探作简单、控制精确、带有良好人机交互界面的自动钻孔系统,该系统以C8051系列单片机为核心微处理器与上位机通信并对运动芯片进行控制,实现了通过触摸屏对多个钻孔机同时进行操作的一对多控制,并在工业生产中通过测试。
关键词:Modbus;触摸屏;MCX314;自动钻孔
0 引言
在工业生产中经常需要对各类器材进行钻孔、啄钻,或者进行螺丝攻牙等操作。由于此类操作工作量大、动作繁琐,通过人工操控效率低、精度不足,因此有必要通过一个具有良好人机交互方式的自动钻孔系统对钻头动作进行控制,实现钻孔操作的简单化与自动化。
在钻孔过程中需要经常观察系统运行状态或者对运行参数进行修改,通过触摸屏良好的人机交互方式可以方便快捷地实现这一目的。现今多数触摸屏控制是基于板载操作系统的平台上,如ARM-Linux,WinCE,μC/OS等,但此类操作平台价格较高,且开发流程复杂,不适用于在工业中大规模生产使用。
本文基于Modbus串口协议的威伦触摸屏与通用型C8051系列单片机作为硬件平台,结合MCX314运动控制芯片,实现了一个结构简单、成本低、有良好人机交互且控制精度高的自动钻孔系统。
1 自动钻孔系统架构
为实现良好的人机交互,系统通过触摸屏实时显示钻头运行状态,包括位置,转速,钻孔速度等参数,同时可以对转速,钻孔速度,钻孔深度,攻牙牙距等参数进行设置,设置完成后通过触摸屏上的按键分别进行自动钻孔、自动攻牙、啄钻等操作。
系统中,钻头运行距离以毫米为基本单位,要求达到小数点后2位的精度,也即10-2mm,对钻孔速度则以10-2mm/s为最小调节精度。最高转速200 r/s,最大钻孔深度为200 mm。攻牙过程中,牙距值范围为0.01~1.99。同时要求提供可设定次数的啄钻操作。
人机交互界面采用台湾威伦电子公司开发的MT6100i触摸屏,使用Modbus协议与微处理器C8051系列单片机进行通信。微处理器通过总线方式对MCX314运动控制芯片进行控制与参数读取。MCX314芯片通过光电耦合驱动伺服电机,带动钻头,整体系统框架如图1所示。

2 系统主控板硬件设计
主控板以微控制器为核心,实现对运动控制芯片的控制以及与触摸屏的串口通信,并对运动控制芯片的输出脉冲进行光电耦合,作为伺服电机的驱动输入。
2.1 主控板硬件框图
主控板主要由微处理器C8051F040和MCX314运动控制芯片构成,两者通过16位数据/地址总线方式通信,MCU通过读写运动控制芯片内部寄存器对其输出脉冲的开关、速率和脉冲量等进行设置,并经过光电耦合电路驱动伺服电机做出不同的动作。主控板提供RS 232的串行接口作为MCU与触摸屏的通信接口,通过Modbus协议由触摸屏控制MCU对运动控制芯片发送指令以及读取数据。同时还提供E2PROM作为参数存储模块,可将设定的运行参数保存起来,系统启动时先读取E2PROM获取参数,而无需每次开机都重新设置参数。主控板框图如图2所示。
2.2 主拉芯片C8051F040
C8051F040单片机是美国Cygnal公司生产的完全集成的混合信号系统级芯SoC,具有64 KB FLASH、4 352 B RAM,CAN控制器2.0,2个串行接口,5个16位定时器,12位A/D转换器,8位A/D转换器及12位D/A转换器等,它内部还带有JTAG接口,在使用JTAG调试时,所有的模拟和数字外设都可全功能运行,使调试变得非常方便。
2.3 运动控制芯片MCX314
MCX314是日本NOVA公司研制的DSP运动控制专用芯片,通过它可以控制由步进电机驱动器或由脉冲型伺服电机驱动的4轴的位置、速度和插补,从而进行定位控制、插补驱动、任意两轴的圆弧插补,脉冲速度范围在1 pps~4 Mpps,可满足绝大多数的高速驱动的需求。在MCX314中对应于每轴电机都有4个在驱动过程中使之减速停止/立即停止的外部输入信号。通过对这些输入信号的分配可以进行原点附近的高速检
索、原点检索、编码器Z相检索等,该芯片还有输入位置控制信号、报警信号和编码器信号,而且,在驱动过程中还可以实时读取控制器运动轨迹的理论位置、实际位置、驱动速度、加速度、加减速度状态等。
MCX314运动控制芯片的性能指标如下:
(1)能够同时控制4个轴的伺服电机或步进电机;
(2)输出的驱动速度范围是从1 pps~4 Mpps;
(3)脉冲输出频率的精确度大于±0.1%(在CLK=16 MHz时);
(4)圆弧/直线插补中,坐标范围是从当前位置到-8 388 607~+8 388 607间;
(5)圆弧/直线插补中,插补精度是±0.5 LSB;
(6)圆弧/直线插补中,插补速度范围是从1 pps~4 Mpps;
(7)连续插补的最大驱动速度是2 MHz。
为达到系统对速度及位置精度的控制要求,设计中采用了10-3mm/p的下钻电机与10-3rad/p的转动电机。
3 软件设计
3.1 系统软件流程
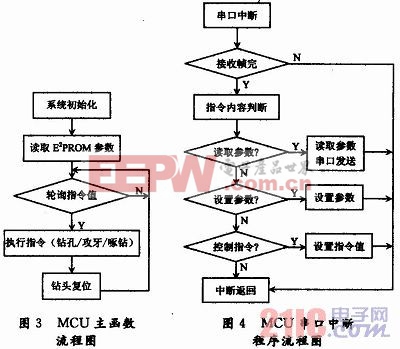
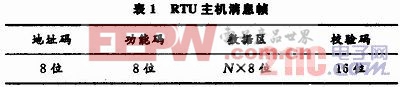
系统软件包括触摸屏软件与MCU程序。其中触摸屏软件设计包括操作界面与各寄存器地址分配,通过威伦电子公司的配套组态软件Easy Builder系列可以方便地完成这部分软件的设计与下载。本系统中触摸屏参数设置为:PLC类型为Modbus RTU,通信口类型设置为RS 232/2W,波特率、数据位个数、效验位、停止位个数设置与MCU系统一致。MCU通过串口中断接收触摸屏指令,进而控制运动芯片,其程序主要包括MCU初始化与运动芯片初始化、串口中断程序、MCX314运动芯片读/写驱动、钻孔/攻牙/啄钻操作函数以及E2PROM读写程序。MCU主函数流程如图3所示,串口中断程序流程如图4所示。
3.2 Modbus协议
Modbus协议是MODICON公司1979年为自己的PLC产品而推出的一个开放式现场总线通信协议,是应用于电子控制器上的一种通用语言,是一种有效支持控制器之间以及控制器经网络(如以太网)与其他设备之间通信的协议,现已成为一种通用工业标准,不同厂商生产的控制设备可以通过该协议连成工业网络,集中监控。
Modbus协议定义了一种通用的消息结构,描述了控制器请求访问其他设备的一个过程,包括如何回应来自其他设备的请求,以及怎样侦测错误并记录,并制定了消息域和内容的公共格式。当在此网络上通信时,每个控制器都拥有一个惟一的地址,并识别按地址发来的消息,最终决定要产生何种动作。如果需要回应,则控制器将生成反馈信息并按此协议格式回应。
3.3 Modbus RTU通信模式
Modbus协议包括2种传输模式,即ASCII码和RTU模式。控制器可以设置为2种传输模式中的任何一种在标准的Modbus网络上通信。本设计采用RTU传输模式。
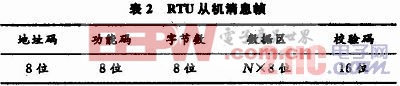
当控制器设备选用RTU模式通信时,消息中的每个字节包含2个4位的十六进制字符。这种方式的主要优点是:在同样的波特率下,能够比ASCII码方式传送更多的数据。Modbus RTU主机消息帧结构如表1所示。
其中,地址码代表从机地址,设置为0,表示广播消息。功能码表示主机指令,包括读/写控钊状态、读/写寄存器等。数据区则为读/写寄存器地址及读取位数。RTU模式采用CRC校验。
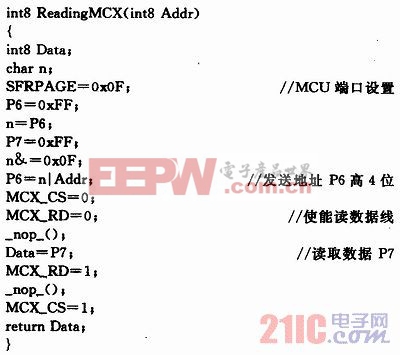
相应的从机返回消息帧结构与主机消息帧结构类似,但是附加了数据字节长度,如表2所示。
3.4 MCX314运动控制芯片控制
MCU通过16位数据/地址总线与MCX314进行通信,可选择8位/16位数据总线格式。本设计采用了8位数据总线格式,在16位总线中分配8位为数据线,4位为地址线,4位为时序控制线。
MCX314是寄存器控制型芯片,对其所有操作都基于寄存器的读/写,按照其发送时序,先发送地址,后读取数据,其基本读/写函数实现如下:
读8位寄存器函数(写寄存器函数与其类似,只需写完置位P7):
MCX314内部寄存器均为16位,基于以上读8位寄存器函数实现读16位寄存器函数(写寄存器函数类似):
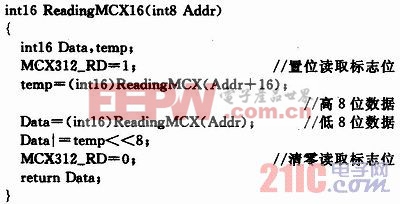
由于程序分别在串口中断与主函数处理指令过程中调用MCX314读/写寄存器函数,可能导致函数重入,造成寄存器读/写数据紊乱,因此在函数内部定义标志位,设计读/写函数为原子操作,防止函数重入。
基于以上读/写寄存器函数可对MCX314进行一系列操作控制,包括写入数据、读取数据、驱动指令与插补指令。在本设计中,写入数据及读取数据分别对应参数设置与系统状态的实时显示;驱动指令用于钻孔运动与啄钻运动;插补指令用于限定牙距的螺丝攻牙运动。通过上述指令实现以下系统操作函数,即运动芯片初始化函数、原点搜寻运动函数、定距手动钻孔函数、自动钻孔函数、啄钻函数、手动攻牙函数、自动攻牙函数等。
4 结语
利用Modbus串口协议开放、透明、开发容易等优点,结合MCX314运动控制芯片的高精度可控性,以及编程方便的总线接口方式,设计出成本低、操作简单、人机交互界面友好的触摸屏自动钻孔系统。本系统对位置与速度控制可分别精确至1×10-3mm与1×10-3mm/s,最高速度分别为4 000 mm/s与4 000 rad/s,最大钻孔深度可达8 000 mm,达到了工业生产中进行自动钻孔或螺丝攻牙的性能指标,并在工业生产中通过初步测试,工作稳定。由于Modbus协议具有网络控制能力,在实际工业生产中可并联多个钻孔系统共用一个触摸屏,通过触摸屏同时控制不同系统进行不同操作,或者采用广播模式控制多个系统进行同一操作,进一步实现低成本和自动化。

伺服电机相关文章:伺服电机工作原理







评论