直流无刷伺服电机运动控制系统设计

Motionchip是一种性能优异的专用运动控制芯片,扩展容易,使用方便。本文基于该芯片设计了一款可用于直流有刷/无刷伺服电机的智能伺服驱动器,并将该驱动器运用到加氢反应器超声检测成像系统中,上位机通过485总线分别控制直流有刷电机和无刷电机,取得了很好的控制效果,满足了该系统的高精度要求。
在传统的电机伺服控制装置中,一般采用一个或多个单片机作为伺服控制的核心处理器。由于这种伺服控制器外围电路复杂,计算速度慢,从而导致控制效果不理想。近年来,许多新的电机控制算法被研究并运用于电机控制系统中,如矢量控制、直接转矩控制等。随着这些控制算法的日益复杂,必须具备高速运算能力的处理器才能实现实时计算和控制。为了适应这种需要,国外许多公司开发了控制电机专用的高档单片机和数字信号处理器(DSP)。现在,通常使用的伺服控制器的控制核心部分大都由DSP和大规模可编程逻辑器件组成,这种方案可以根据不同需要,灵活的设计出性能很好的专用伺服控制器,但是一般研制周期都比较长。
MotionChip的特点
MotionChip是瑞士Technosoft公司开发的一种高性能且易于使用的电机运动控制芯片,它是基于TMS320C240的DSP,外围设置了许多电机伺服控制专用的可编程配置管脚。TMS320C240是美国TI公司推出的电机控制专用16位定点数字信号处理器,其具有高速的运算能力和专为电机控制设计的外围接口电路。MotionChip很好的利用了该DSP的优点,并集成多种电机控制算法于一身,以简化用户设计难度为目的,设计成为一种新颖的电机专用控制芯片。MotionChip有着集成全部必要的配置功能在一块芯片的优点,它是一种为各种电机类型进行快速和低投入设计全数字、智能驱动器的理想核心处理器。具有如下特点:
·可用于控制5种电机类型:直流有刷/无刷电机、交流永磁同步电机、交流感应电机和步进电机,且易于嵌入到用户的硬件结构中;
·可以选择独立或主从方式工作,并可根据需要,设置成通过网络接口进行多伺服控制器协同工作;
·全数字控制环的实现,包括电流/转矩控制环、速度控制环、位置控制环;
·可实现各种命令结构:开环、转矩、速度、位置或外环控制,步进电机的微步进控制,并可实现控制结构的配置,其中包括交流矢量控制;
·可以配置使用各种运动和保护传感器(位置、速度、电流、转矩、电压、温度等);
·使用各种通讯接口,可以实现RS232/RS485通讯、CAN总线通讯;
·基于Windows95/98/2000/ME/NT/XP平台,强大功能的IPM Motion Studio 高级图形编程调试软件:可通过RS232快速设置,调整各参数与编程运动控制程序。其功能强大的运动语言包括:34种运动模式、判决、函数调用,事件驱动运动控制、中断。因此便于开发和使用。
·可以通过动态链接库TMLlib,利用VC/VB实现PC机控制;也可以与Labview和PLC无缝连接,通过动态链接库,用户可以在上层开发电机的控制程序,研究控制策略。
运动控制系统设计
本文是以MotionChip为控制器核心,直流无刷电机/有刷电机/永磁同步电机为控制对象进行伺服驱动器设计。设计指标为:适应12—36V宽范围直流母线电压输入,工业标准5V逻辑电源输入,最大输出电流3A,峰值电流6A。在进行伺服控制器设计之前,根据MotionChip的特点和伺服电机的特性进行总体功能设计如下:
·采用位置环、速度环、电流环的三环结构;三环都采用PID调节器;电机参数设置采用计算机辅助计算和工程整定相结合的办法;
·具有通用伺服控制器接口,并可利用提供的人机接口进行独立参数设置,有网络通讯接口进行独立参数设置,有网络通讯接口方便外部监视和控制。
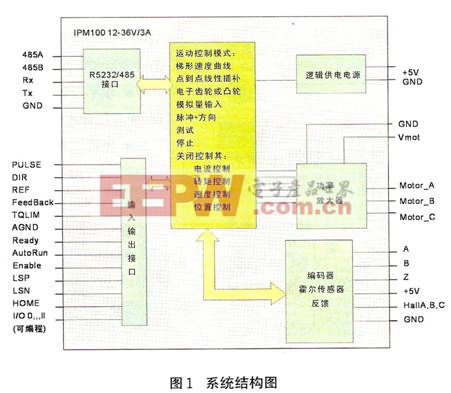
伺服系统的总体系统结构可以分为:MotionChip最小系统、驱动电路、电流反馈检测、外部控制接口、通讯接口等,如图1所示。伺服驱动器的硬件结构分为2个主要部分:驱动电路部分:主要包括逆变桥、前置驱动、电流检测;
控制电路部分:包括反馈检测、外部控制接口、通讯接口、MotionChip最小系统。
控制系统设计
在MotionChip的基本系统中,选用美国 Xicor公司的SPI串行EEPROM:X25650来存储TML运动指令。该EEPROM的存储容量为8K×8bit,最大时钟频率可达5MHz。由于在MotionChip正常运行时指令访问时间21ns,所以为了使程序高速有效的运行,增加了2片32可×8bit的静态RAM:ASC256-12JC,该SRAM的存取时间为12ns,所以MotionChip对该芯片的存取时间为12ns,所以MotionChip对该芯片的存取数据时不需要插入等待状态。并且该SRAM具有较低的活跃功耗,在待机状态时可自动进入更加低功耗的节能状态。MotionChip芯片本身提供了电机控制专用的接口,包括6路PWM信号,在使用中可以配置作为三相电机逆变桥的驱动信号。当保护中断PDPINT有效或电机使能信号ENABLE无效时,6路PWM信号立即进入高阻状态,使逆变桥全部截至,电机停转。另外,MotionChip为每个PWM输出对提供了可编程死区时间设置(0—102μs),所以不需要外部的死区逻辑电路。码盘反馈信号接口有ENCA,ENCB,ENCZ,其中ENCA和ENCB是相位差90°的脉冲信号,ENCZ是码盘清零信号。MotionChip可以对ENCZ和ENCB信号进行四倍频和辨向,然后送入增量计数器计数产生电机的位置信号,码盘清零信号ENCZ可对计数误差进行修正。电机霍尔反馈信号HALL1,HALL2,HALL3,是为直流无刷电机/永磁同步电机进行定位磁极设计的。其它重要引脚如DIR、PULSE直接作为电机脉冲指令的输入接口。LSP,LSN可用来扩展作为运动系统左、右限位事件的捕捉输入。MotionChip有2个10位的A/D转换器,每个都内建了采样保持电路,最快采样速率可达10kHz。模拟信号的输入范围通过MotionChip参考电平输入管脚VREFLO和VREFHI确定。MotionChip可以工作在独立运行和检测引脚AUTORUN进行方式选择的,该引脚接高电平,MotionChip工作在从属方式,接低电平工作在独立运行方式。在独立方式的工作条件下,MotionChip上电后,选检测到AUTORUN的低电平,进入独立运行方式;然后自动从SPI串行EEPROM中的开始执行TML程序。
驱动系统设计
电机的驱动主要包括2个环节:电机PWM驱动电路和电流检测。
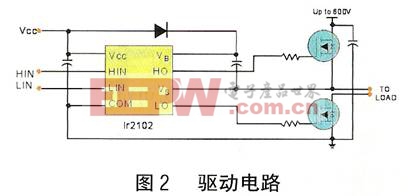
电机的PWM驱动电路如图2所示。本电路中,无刷直流电机采用全桥驱动,这样可以使用电机工作于四象限(正向驱动、制动及反向驱动、制动)。驱动一个无刷直流电机需要6路PWM信号,而MotionChip的每个事件管理模块(EV)中3个带可编程死区控制的比较单元可以产生独立的3对共6路PWM信号。所以在电路中,直接选用事件管理模块B(EVB)中的比较单元来产生6路所需要的PWM信号,其输出引脚为PWM7~PWM12,其中PWM7~PWM9输出设为驱动MOSFET功率管桥路的上半桥,PWM10~PWM12输出驱动下半桥。DSP输出的这两种3路PWM信号经过IR2102前置放大后分别驱动MOSFET功率管桥路的上半桥(Q1,Q3,Q5)和下半桥(Q2,Q4,Q6)进行电机的驱动。
电流检测
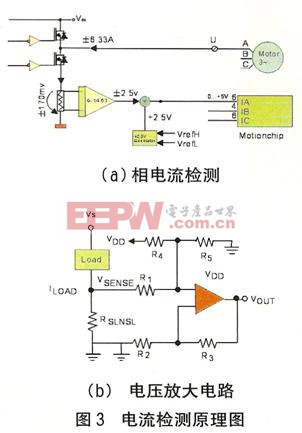
电机电流检测电路可提供重要的反馈信息,将该信息与来自主控DSP的控制信号相结合,可以控制MOSFET或IGBT的栅极驱动芯片并最终调整电机速度。如果要实现过流保护,还必需进行电流监控,不过对于低端应用而言,传统的过流保护却显得过于昂贵。电流采样的方案是在逆变桥的下桥臂串一0.027Ω采样电阻如图3(a),采样电流范围为0~6.22A,采样后的电压放大倍数为14.63倍,放大电路如图3(b),并经2.5V电压抬升输入DSP,所以输入DSP的电流模拟电压量为:
UAD=2.5+I×0.027×14.63。
MotionChip AD口的模拟量输入电压为0~5V,所以电流采样经量化的值为:

pid控制相关文章:pid控制原理
pwm相关文章:pwm是什么
霍尔传感器相关文章:霍尔传感器工作原理
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
霍尔传感器相关文章:霍尔传感器原理 矢量控制相关文章:矢量控制原理 汽车防盗机相关文章:汽车防盗机原理








评论