无人机航空遥感平台机载作业控制系统设计

摘要:无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点。为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态,系统以AT89S52为主控芯片,扩展多路串口及USB接口以实现系统与外围设备的通信,同时设计了相机驱动模块及三自由度步进电机驱动模块。通过无人机航空遥感实验证明该系统能够满足遥感实验要求。
关键词:无人机;遥感;AT89S52;姿态控制
0 引言
无人机技术作为人类早期航空的重要组成部分,已有一百多年的历史,在军事领域得到了广泛的应用,主要西方国家都将其当作未来空军最具优势和前景的发展方向。近年来,无人机的应用范围已经由最初的军事领域拓展至民用领域和科研领域。我国无人机工业起步虽晚,但发展迅速.已步入世界前列。现代社会中,遥感技术已成为人类获取地理环境及其变化信息的重要手段。随着信息科学与相关产业的发展,各国对遥感数据的需求急剧增长,然而对于许多发展中和不发达国家而言发展耗资巨大的航天遥感系统目前存在技术上和资金上的困难。将无人机作为航空摄影和对地观测的遥感平台为解决这种困难提供了一种新的技术途径,为遥感应用注入了新鲜血液。
无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点。然而,传统的无人机并不是为遥感目的而设计的,同样,许多遥感设备也不是专门为无人机设计的,其结果是导致了他们之间的集成困难,为了满足遥感科学实验、定标遥感与真实性检验、遥感传感器试验等遥感实验巨大需求,无人机航空遥感实验平台是一个很好的解决方案。无人机航空遥感平台机载作业控制系统能够协调无人机航空遥感平台中电子吊舱的多组件的工作,实时对遥感影像传感器进行姿态控制,对于获得良好有效的遥感数据起到至关重要的作用。
1 系统功能及结构
系统的目标是满足无人机航空遥感作业需求。该系统控制无人机按照预定的作业计划任务或者接受人工遥控执行遥感作业,协调电子吊舱中多组件的工作,与数传电台、自动驾驶仪、稳定云台、航姿系统以及CCD/相机相连。
系统功能包括:
(1)接收数传电台命令,将命令分流到稳定云台和CCD/相机;
(2)接收航姿系统和自动驾驶仪的时间、经度、纬度、高度、俯仰、滚动、航向等参数,将其存储在控制系统中并由数传电台回传至地面飞行控制站;
(3)根据航姿系统参数生成电机驱动参数,驱动稳定云台,保持稳定云台处于稳定水平(或垂直)状态;
(4)数据存储,存储作业任务及航姿系统和自动驾驶仪的相关参数,并能够通过USB接口导入地面飞行控制站。
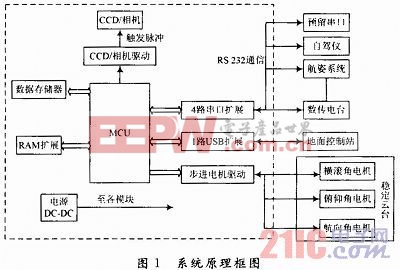
无人机航空遥感平台机载作业控制系统原理框图如图1虚线内部分所示,系统由MCU(微控制器)、电源、数据存储器、RAM扩展、4路串口扩展、1路USB扩展、步进电机驱动、CCD/相机驱动及电源共8个子模块组成。MCU是整个系统的核心部分,负责与其数据存储器、4路串口扩展、1路USB扩展及RAM扩展模块间的通信,并根据作业计划产生CCD/相机和步进电机的控制信号,控制相应的驱动模块。电源模块负责给
各子模块供电。核心器件选用美国ATMEL公司开发的一款采用CMOS工艺低功耗、高性能的8位微处理器AT89S52。该芯片片内集成8 KB ISP(In System Programmable)可重复擦写高密度非易失性Flash。全面兼容Intel 80C51的输出引脚及指令系统。从而不需要额外扩展程序存储器,同时也能快速的处理数据处理任务。
2 系统硬件实现
2.1 4路串口扩展电路
4路串口扩展电路由TL16C554A芯片实现。TL16C554A是一个整合4个通道即TL16C550C的增强型异步通信组件(ACE)。它的每个通道能从外围设备或MODEM接收数据,实现串--并转换;同时,它也可以从CPU端接收数据,实现并--串转换。CPU可以在工作时随时查询每一个通道的完整状态,监视各种命令的执行及任何发生的错误。
TL16C554A四通道异步通信组件可以置于交替于交替FIFO模式,该模式激活内部FIFO以使16个字节(加上接收FIFO中每个字节的3位误差数据)可以同时存储在接收与发送模式中。FIFO工作模式具有自动流控特点,可以极大地降低软件开销,并且可以通过![]() 输出信号和
输出信号和![]() 输入信号自动控制串行数据流来提高系统效率。所有逻辑均在片内以便使系统开销最小,使系统效率最高。这2个引脚端还用于对直接存储器访问(DMA)传送信号。每个异步通信组件都含有一个可编程的波特率发生器,可以将定时基准时钟输入除以1到216-1之间的任意数。
输入信号自动控制串行数据流来提高系统效率。所有逻辑均在片内以便使系统开销最小,使系统效率最高。这2个引脚端还用于对直接存储器访问(DMA)传送信号。每个异步通信组件都含有一个可编程的波特率发生器,可以将定时基准时钟输入除以1到216-1之间的任意数。









评论