无人机航空遥感平台机载作业控制系统设计
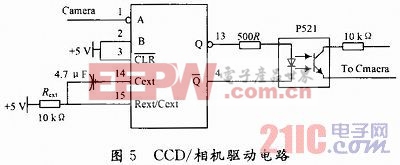
CCD/相机驱动电路如图5所示。图示参数的单稳态触发器高电平持续时间约为33 ms,可根据相机的实际曝光时间的需要,改变电路的充电时间常数RC来调节稳态时间的长短。图中Camera为单片机P3.5口,当其为下降沿时,触发单稳态触发器输出高电平,此高电平作用于光耦合器P521的二极管端,从而触发三极管端导通,进而触发相机快门。P521的输出端串接一个10kΩ的电阻,防止导通时电流过大而损坏相机。本文引用地址:http://www.eepw.com.cn/article/160475.htm
2.5 其他模块电路
数据存储模块由AT24C512实现,单片机P3.0,P3.1口分别与AT24C512的SCL、SDL端口相连,并接入上拉电阻,模拟I2C总线扩展64 KB E2PROM数据存储器。SRAM扩展由IDT6116SA芯片实现,扩展2 KB用于缓存单片机计算过程中的临时数据。系统输入电压为12 V直流电,电源模块采用7805与7805两片三端稳压器串接,降低单片稳压器两端的压降,获得平稳的+5 V电压。|
3 系统软件设计
系统主程序流程图如图6所示。
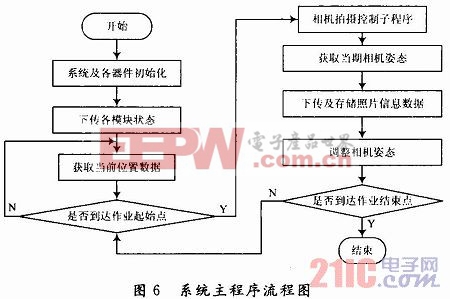
系统上电后进行系统及各器件初始化,包括单片机内部地址及数据初始化、TL16C554A芯片波特率及FIFO模式设定及CH375工作模式的设定。初始化后检查系统外围器件的工作状态,将其状态信息发送至地面站,系统通过自动驾驶仪不断获取当前的位置信息,判断是否到达作业任务起始点,若到达则根据预设的拍摄方式进行拍摄控制,拍摄方式包含等时间间隔拍摄和等距离拍摄。系统从航姿系统中获取当前相机的姿态参数,然后将当前照片信息数据打包通过数传电台发送至地面监控站,然后系统根据姿态参数计算出步进电机运行的脉冲数及方向,控制步进电机驱动模块调整相机姿态。当无人机到达作业任务结束点后,主程序结束。系统允许地面遥控操作。
4 结语
通过实验证明本系统可以较好的满足无人机航空遥感平台机载作业控制的要求,可以协调电子吊舱的各个组件工作,控制相机的姿态,实时下传机载作业数据,使用的I/O口较少,USB接口的扩展解决了当前许多笔记本电脑不具备COM口的问题,在野外实验时亦可及时的处理作业系统中的照片信息数据。单片机仍还有较多的资源可以利用,可方便系统的升级,但同时也受到微处理器数据处理能力的限制。












评论