无人机航空遥感平台机载作业控制系统设计
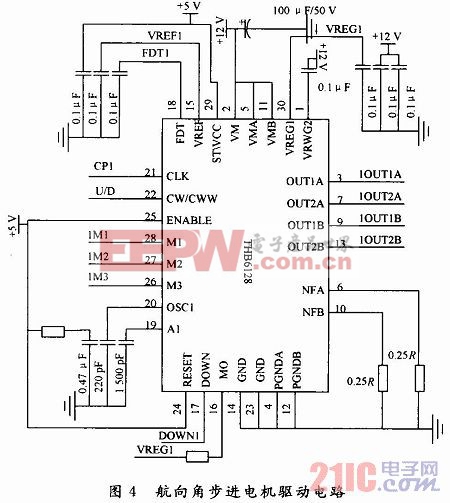
THB6128是高细分两相混合式步进电机驱动专用芯片,通过单片机输出控制信号,即可设计出高性能、多细分的驱动电路。其特点为双全桥MOSFET驱动,低导通电阻Ron=0.55 Ω,最高耐压36 V,大电流2.2 A(峰值),多种细分可选,最高可达128细分,具有自动半流锁定功能,快衰、慢衰、混合式衰减3种衰减方式可选,内置温度保护及过流保护。图4为航向角步进电机驱动电路,俯仰角、横滚角步进电机驱动与之相同。图中CP1与U/D分别为单片机给出的驱动脉冲与电机运行方向控制信号。M1,M2,M3为电机驱动细分数选择信号输入,由拨码开关人为控制。FDT1与VREG1分别为衰减模式选择电压与电流控制电压输入端。当3.5 VFDT15 V时为慢衰减模式;当1.1 VFDT13.1 V时为混合衰减模式;当FDT10.8 V时为快衰减模式。调整VREG1端电压即可设定步进电机驱动电流值。电流值:
Iout=(VREF/5)×(1/Rs)
式中Rs为NFA(B)外接检测电阻。本系统中Rs固定为0.25 Ω,FDT1与VREF1均可调。本文引用地址:http://www.eepw.com.cn/article/160475.htm
2.4 CCD/相机驱动电路
CCD/相机驱动由单稳态触发器74LS221和光耦合器P521实现。74LS221既可以下降沿触发也可上升沿触发,且都可以禁止输出。其输出的脉宽通过内部补偿获得而不受外部电压和稳定影响,在大多数应用中,脉宽只由外接的时控元件决定。脉宽tw(out):
tw(out)=CextRextln 2≈0.7CextRext












评论