除尘竞赛机器人及其控制策略研究

摘要:采用嵌入式微处理器、传感器和直流电机控制技术,设计基于16位高性能微处理器MSP430的除尘竞赛机器人。MSP4130F5418微处理器通过红外传感器和电子指南针分别获得障碍物和角度信息,进行处理后控制机器人的避障和转向,通过各模块的协同工作使机器人顺利完成除尘任务。在第四届江苏省大学生机器人大赛除尘比赛中,除尘面积覆盖率达到80%以上,并取得一等奖,表明该除尘竞赛机器人具有成本低、可靠性高的特点,达到了设计要求。
关键词:MSP430 F5418;红外传感器;电子指南针;控制策略;除尘竞赛机器人
目前机器人的发展已经成为衡量各个国家科技力量的重要标准,欧美、日本等发达国家机器人设计已日趋成熟,种类繁多、功能强大。我国也投入了大量的人、财力进行机器人的研究和开发,非常重视机器人的教学,把机器人作为小学、中学和大学的实训、实践课程,大力开展国家、省和市级各种学生竞赛,极大地推进了机器人在我国的普及,为机器人的研究打下了坚实的基础。
竞赛机器人的设计出现了百花齐放的景象,结构上有人形机器人、轮式机器人、足式机器人和履带机器人等;完成任务上有服务机器人、灭火机器人、除尘机器人、游景点机器人等。针对不同的任务,具有各自的特点,除尘竞赛机器人的主要性能指标是除尘面积的覆盖率及完成的时间。本文采用16位微处理器MSP430F5418微控制器,设计轮式机器人,通过四路直流电机控制机器人的避障和运动,完成竞赛任务。
1 总体结构
由于除尘竞赛机器人完成的任务较单一,并对其体积的大小有严格的规定,所以机器人的设计应尽量简洁实用,避免不必要的冗余设计。为此,本文采用模块化方法设计除尘竞赛机器人,可根据实际需要灵活地增加模块、完善系统,完成规定的任务;系统主要由主控制板、电源管理模块、红外测距模块、电子指南针及电机控制板等组成,其系统结构如图1所示。
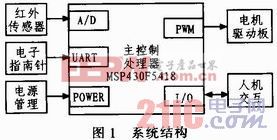
主控制器采用16位微控制器MSP430F5418,因该器件具有较高的运算速度、丰富的外围接口以及低廉的价格而广泛地被使用,负责对传感器采集到的数据进行处理,根据获得的有效信息对电机的运动进行控制。电源管理模块主要负责为整个系统中各个模块提供独立稳定的电源;红外测距传感器负责采集环境的障碍物信息,为机器人的避障提供依据;电子指南针获得角度信息来控制机器人的转向;电机驱动板负责驱动控制直流电机。
2 系统实现
系统主要有主控制板、电源管理模块、红外测距模块、电子指南针及电机控制板等组成,红外测距和电子指南针模块是系统实现的关键。
2.1 红外测距传感器
红外传感器主要负责测量机器人与障碍物之间的距离,为了可靠获得场地及环境信息,红外测距传感器的位置部署很关键,7个传感器部署的俯视图侧视图分别如图2和图3所示。
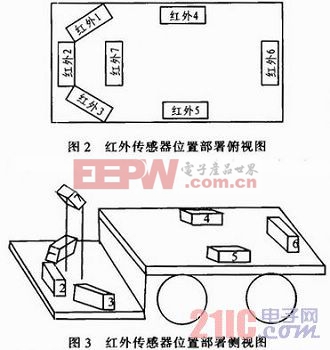
图2左端为除尘机器人头部,机器人头部安装红外传感器1、2、3,它们分别呈45°、90°、135°放置,用来探测机器人头部正前方以及两侧的障碍物,由于除尘竞赛机器人大赛场地的平台高度比较低,为了能够检测平台的周边,传感器1、2、3安装在较低的位置。机器人两侧的红外传感器4、5用来保证机器人在进入房间进行转向时整个车身处于宽阔地带,如果仅靠红外传感器1或3,判断前方的空白区域可能会出现机器人过早进行转向,撞到墙壁的情况。红外传感器7倾斜45°安装,当机器人在平台上运行时可以通过检测平台边缘高度的突变来感知路况。红外传感器6用来获得机器人后方的信息作为辅助信息。










评论