除尘竞赛机器人及其控制策略研究
3.1 路径规划
为了使机器人的遍历面积达到最大化,要对其运行路径进行合理的规划。为此,将场地划分为图中的4个房间,机器人的运行路径为1->2->3->4->3->1。机器人运行策略的流程如图6所示。本文引用地址:http://www.eepw.com.cn/article/160450.htm
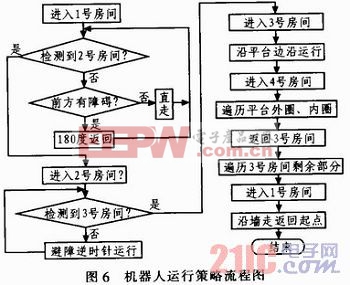
机器人的运行流程可以分为6个步骤:
1)机器人在1号房间内进行折返式遍历,从起点出发向图中左方前进,遇到挡板180°返回,如此反复,直到检测到2号房间门口的黑线为止,这样可以确保1号房间的遍历面积达到最大。
2)机器人进入2号房间后,以圆柱型障碍物为中心,逆时针方向运行一圈即可达到最大遍历面积。
3)机器人从2号房间出来进入3号房间时,由于4号房间是凸出的平台,可以直接沿4号房间和斜坡的边沿运行,进入4号房间,3号房间剩余的面积可以在返回时进行遍历。
4)由于4号房间是平台,且必须遍历平台的三分之一以上的面积,4号房间的遍历面积才有效,所以机器人在平台上遍历两圈,首先,机器人沿着墙壁和平台边沿在平台上进行外圈的遍历,然后在第二次遇到相应的墙壁和平台边沿时,进行适当的后退,进行内圈的遍历达到较大的遍历面积。
5)机器人从平台下来以后再次进入房间3,可以根据墙壁和障碍物的信息,对步骤3中剩下的面积进行遍历。
6)采用沿墙走策略安全回到起始点。
3.2 转角控制
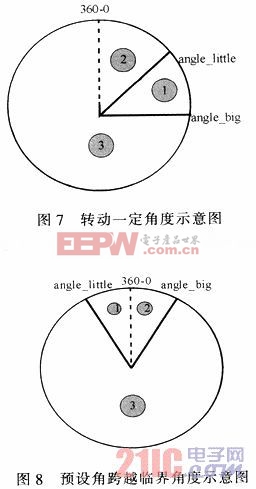
电子指南针为机器人的运行提供角度信息,在实际应用中,除尘机器人转动的角度有45°、90°、180°三种大角度。电子指南针模块输出0°~360°的角度信息,考虑到竞赛场地方向的不确定性,通常采用相对角度而非绝对值。即采用获取当前的角度值,然后预设要转过的角度,对采集到的角度信息进行查询比较,当到达或超过预设角度时就停止转角工作,进入下一步的任务。在调试过程中,发现机器人在转角的过程中会出现连续打转的非正常情况。经过分析研究发现,主要原因是信息获取的抖动以及环境的影响,为此,将具体的预设角度扩展为一个范围,一般情况下机器人转动一定角度的原理如图7所示。将具体的预设角度扩展为一个范围又引入了新的问题,这是预设角度范围存在从360°到0°突变,也就是经过360°(0°)的临界点造成的,预设角跨越临界角度示意图如图8所示。












评论