除尘竞赛机器人及其控制策略研究
2.2 电子指南针
电子指南针是除尘机器人设计的关键部件,角度信息的处理直接关系到能否对机器人的转向进行精确控制。电子指南针的设计结构如图4所示。本文引用地址:http://www.eepw.com.cn/article/160450.htm
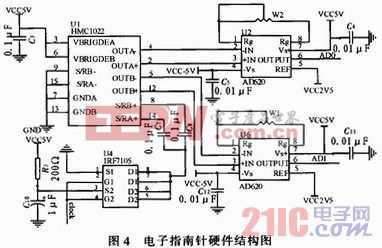
HMC1022作为新一代磁传感器,具有灵敏度高(0.1°)、响应时间快(1μs)、输出频率高(1 000 Hz)、体积小及固态封装等优点,电路中IRF7105为HMC1022磁阻芯片提供置位/复位脉冲,HMC1022磁阻传感器根据地磁场的施加方向,产生两路差分模拟信号,经过两路AD620放大电路进行差分放大,得到两路模拟电压AD0和AD1,经过微控制器LPC938的10位高精度A/D转换后获得数字信号,再进行数字滤波后计算出机器人的角度值,最后将其角度值通过UART串口传送给MSP430F5418主控制器。UART串口协议由起始字(0x24),角度值高8位,角度值低8为,结束同步字(0x55)组成。
3 软件设计
软件是机器人系统的灵魂,软件的好坏直接关系到机器人能否稳定的工作,除尘竞赛软件的设计要充分考虑到场地的具体环境,采取有效地路径规划。江苏省机器人大赛除尘比赛的场地模型如图5所示。












评论