利用电磁导航的AGV设计

摘要:随着物流系统的迅速发展,AGV的应用范围也在不断扩展,为了满足用户功能、价格、质量方面需求的AGV系统,研究设计了一种基于电磁导航的无人驾驶小车系统方案。通过实际硬件实验,系统能够达到预期设计要求,能够广泛运用于工业、军事、交通运输、电子等领域,具有良好的环境适应能力,很强的抗干扰能力和目标识别能力。
关键词:电磁导航;AGV;无线传输;控制算法
0 引言
AGV(Automated Guided Vehicle)是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有各种移载功能的运输车。无人AGV广泛地应用于现代工业控制系统中,能完成人工条件下不能完成的任务,可以保障系统在不需要人工导航的情况下自动行驶。
AGV包含了自动控制系统、引导方式的系统和信息无线传输等部分。通过各种算法研究,该设计有效地确定了小车的位置且能很好控制小车运行状态。小车运行时,可以实时采集数据并传回电脑,从而很好地对周围环境进行监控。系统利用电磁轨道(Electromagnetic path-following System)设立其行进路线,电磁轨道黏贴於地板上,无人搬运车则依循电磁轨道所带来的信息进行移动与动作,并自动采集相关信息。根据小车采集的信息,上位机给小车发送指令,控制摄像头转动,以便获取不同区域的视频信息。
1 系统硬件设计
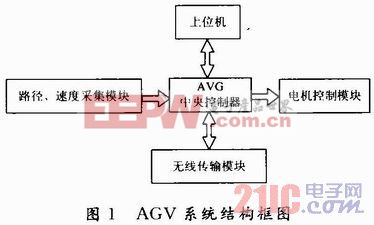
AGV系统结构框如图1所示,上位机首先通过遥控的方式给小车指定运行路径;小车上的电磁传感器将采集到的电磁信号经过放大检波变成直流电压信号,单片机再对该信号进行模/数转换,利用PID算法,获取小车距离中心位置的偏差,再把差值赋给舵机,从而实现小车沿着导线的中心自动运行;最后,小车采集的数据实时传回电脑显示,与此同时,上位机可给小车发出指令,让小车执行相关任务。
1.1 中央控制器
中央处理器采用Freescale公司推出的S12系列单片机中的一款增强型16位单片机MC9S12DG128(以下简称DG128),片内资源及I/O接口丰富,接口模块包括SPI,SCI,IIC,A/D,PWM等,在汽车电子应用领域具有广泛的用途。
MC9S12G128的单片运行方式是最常用的应用方式。因片内已经有较大的RAM,FLASH空间,一般无需扩展外部RAM或外部FLASH。本设计应用DG128来实现对系统的总体控制。
1.2 速度采集模块
速度检测利用霍尔效应来实现。当一块通有电流的金属或半导体薄片垂直地放在磁场中时,薄片的两端就会产生电位差,两端具有的电位差值称为霍尔电势U,其表达式为:
U=K·I·B/d (1)
式中:K为霍尔系数;I为薄片中通过的电流;B为外加磁场(洛伦兹力Lorrentz)的磁感应强度;d是薄片的厚度。
霍尔片的输入端是以磁感应强度B来表征的,当B值达到一定的程度时,霍尔开关内部的触发器翻转,霍尔开关的输出电平状态也随之翻转。输出端一般采用晶体管输出,和接近开关类似。当有磁钢接近霍尔片的时候时(在一定的距离范围内才有反应),设置单片机定时器的时间为t,计数器计数为n,一个转盘上的磁钢数量为s,则转速(单位:r/s)的计数公式为:
speed=(n/s)/t (2)






评论