利用电磁导航的AGV设计
1.3 无线传输模块
本设计采用DTD462无线传输模块,西安达泰公司生产的DTD462无线传输模块,广泛地运用于无线数据传输领域。它能提供高稳定,高可靠,低成本的数据传输,还提供了丰富的外围接口,并具有安装维护方便,绕射能力强,组网结构灵活,范围覆盖宽等特点。采集数据的实时传送,满足客户对于数据实时性,准确性的要求。此类无线传输方式有高可靠性、体积小、重量轻,传输距离30~300 m等特点。系统摄像头采集到的视频信息通过DTD462嵌入式无线数据传输方式,传输到接收端在上位机软件中显示监视图像。
1.4 电机控制模块
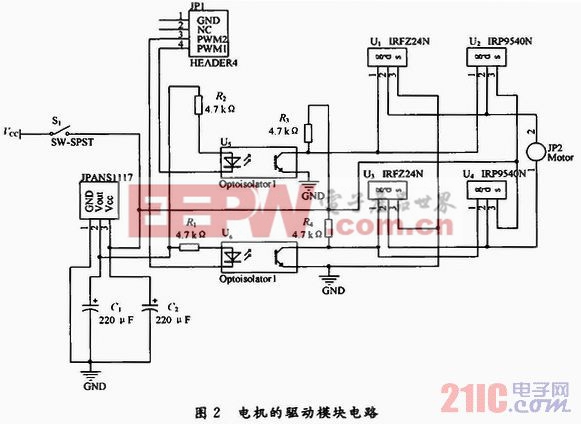
在电机控制模块的设计中,使用IRFZ44N和IRF9540N搭建了H桥电路,能够实现电机的正转和反转。用光耦对单片机的输出调制信号进行隔离输出,能有效地消除电机转动对单片机的工作干扰。电机的控制模块电路如图2所示。调试过程:当PWM2的输出为高电平,PWM1为低电平时,U5输出低电平,U6输出高电平;U1的d,s导通,d接地,U2的d端接地,而U3的d,s截止,U4的d,s导通,输出高电平,因此电机正转;反之,若PWM2的输出为低电平,PWM1为高电平时,电机反转。小车的转向和摄像头的转动是用2个舵机来分别驱动的。通过编程用软件输出标准PWM信号来驱动舵机,一般PWM控制信号的周期为20 ms。当给舵机输入脉宽为0.5 ms,即占空比为0.5/20=2.5%的调制波时,舵机右转90°;当给舵机输入脉宽为1.5 ms,即占空比为1.5/20=7.5%的调制波时,舵机静止不动;当给舵机输入脉宽为2.5 ms,即占空比为
2.5/20=12.5%的调制波时,舵机左转90°。可以推导出舵机转动角度与脉冲宽度的关系计算公式为:
t=1.5±θ/90° (3)
式中:t为正脉冲宽度(单位:ms);θ为转动角度。注意当左转时取加法计算,右转时取减法计算结果。本文引用地址:http://www.eepw.com.cn/article/160297.htm
2 系统软件设计
2.1 控制算法
该设计重点是研究以下的控制算法,即平均值滤波算法,位置加权和PID算法。
平均值算法是对电感获取的信号进行放大检波之后,累加多次,在取平均值,可以有效去掉干扰的影响。
![]()
式中:get_ad[i]表示第i次取得的ad值;n表示取ad的次数位置加权就是对电磁传感器的ad平均值进行位置加权,获得小车的位置。小车的位置在[10,110]范围内变化,具体计算如式(5)所示:
position=(110*ad_result[0]+10*ad_result[1])/(ad_result[0]+ad_result[1]) (5)
式中:ad_result[0]表示其中一路输入信号的平均值;ad_result[1]表示另一路输入信号的平均值;position即加权后的位置值。
PID算法是根据position算出某一时刻的位置偏差,再对偏差进行PID的运算,从而得到舵机的转角。
duoji=1155+KP*error[1]+KI*(error[1]+error[0])+KD*(error[1]-erroe[0]) (6)
式中:error[1]是此时刻的偏差;error[0]是上一时刻的偏差;KP,KI,KD分别是比例系数、积分系数和微分系数。















评论