泵站电机交流励磁调速的控制技术介绍

1引言
本文引用地址:https://www.eepw.com.cn/article/160062.htm为减少洪涝灾害,我国在大江大河流域建设了许多电力排灌站。一般电力排灌站设计为固定扬程。在洪涝期间,外江水位超过设计扬程时,泵站被迫停机,使内河渍水不能及时排出,给国家和人民财产带来严重损失。如果此时能使电机超同步运行如提速5%,则水泵扬程可提高10%左右,这可在很大程度上解决水泵因外江水位过高而被迫停机的问题,减少内河涝灾损失。因此实现此类电机的超同步运行具有很大的社会与效益。
由于泵用电动机定子侧供电电压为高压,在定子侧采用变频调速时,调速设备价格昂贵,且升速受供电电压限制。如采用双馈调速,则因泵机要求调速范围有限(仅为±10%),变频设备容量比在定子侧调速要小得多,经济上合算。采用双馈调速的另一个重要优点是:它从电网吸收的无功功率可通过调节励磁电流的大小及相位进行调整,即电机的功率因数可调,还可进相运行。由于该类泵站机组数量大,所以采用此技术以后,对节约电能及改善当地电网功率因数将起到重要作用。
交流励磁双馈调速电机转子变频器既可选用交直交变频器,也可选用交交(AC/AC)变频器。由于交交变频器低频运行时性能优于交直交变频器,因此泵站电机双馈调速采用交交变频是十分合适的[1][2][3]。本文介绍采用三相零式交交变频、以16位单片机为控制核心并采用现场可编程芯片作为存储器与逻辑电路实现的调速系统设计方案,提出了以期望的功率因数为参数、对转速进行反馈调节时转子电流幅值、相位等给定值的计算方法,给出了系统的软硬件设计。
2系统结构
双馈调速系统由线绕电机M、励磁变压器T、交交变频器及控制电路等构成。系统结构如图1所示。
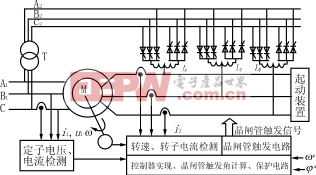
图1泵站双馈电机交流励磁调速系统框图
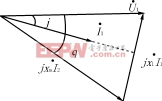
图2电机矢量关系
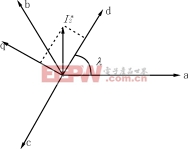
图3两相到三相矢量变换示意图
交交变频主电路在控制电路作用下实现向电机转子供电(超同步运行)或将转子能量回馈到电网(低同步运行)。为使转子电流较为平滑、限制误触发瞬时短路电流,主电路中加入了平衡电抗器LP。
控制电路主要完成定子功率因数、转子电流及转速等检测,并依据给定转速、功率因数与相应实际值的差别,根据反馈控制的基本思想,按照一定的控制算法,计算转子供电频率、电流幅值与相位的期望值,进而确定各晶闸管的触发角以实现对晶闸管的控制。实现系统在给定转速(ω*)和给定功率因数角(φ*)附近的稳定运行。
对于既定形式的主电路,其参数可依据电机基本数据如额定功率、输入电压、转子感应电势,及调速范围要求等来确定。
3控制方法
如前所述,改变转速是通过调节转子的供电参数来实现的,即通过控制转子的供电频率、转子电流的幅值与相位来调速。
31转子供电频率
设ω1为同步转速对应的电源角频率,ω为电机实际转速对应的电角频率,ωS为转子供电角频率。则稳态时有:
ωS=ω1-ω
当实际转速和期望转速不同时,可调整转子供电频率使实际转速向期望值靠扰。为使电机转速平稳变化,采用下式计算转子供电频率的给定值ωS*:
ωS*=ω1-αω*-(1-α)ω
这里0α≤1,α可随转速变化有所改变,特别是当实际转速接近期望转速时,可取α=1。
32转子电流幅值与相位![]()
![]()
![]() 设稳态时定子电压空间矢量为,定子电流空间矢量为,转子电流空间矢量为,不记定子电阻影响,有[4]
设稳态时定子电压空间矢量为,定子电流空间矢量为,转子电流空间矢量为,不记定子电阻影响,有[4]![]() (1)
(1)
如果控制系统的功率因素角φ(超前φ记为负值,滞后为正)具有期望值φ*,并在运行中保持不变,则调节定子电流大小即可调节输出有功大小,从而也可调节转速。反过来,当对速度进行反馈调节时,速度调节器的输出可认为是定子电流大小的期望值I1*。为保证实际功率因素角φ=φ*,应选择转子电流幅值与相位,使得对期望的I1*及φ*,电机矢量关系式(1)成立。
由图2可知:
xmI2sinθ=x1I1cosφ
U1-x1I1cosφ=xmI2cosθ![]()
![]() 故选转子电流幅值、与夹角θ的期望值分别为:
故选转子电流幅值、与夹角θ的期望值分别为:![]()
![]() I2*=
I2*=![]() θ*=arcsin
θ*=arcsin
当φ*=0时,定子只从电网吸收有功功率,在泵机提速时可充分利用电机容量。







评论