一种船载光电稳定跟踪伺服系统的设计与实现

摘要:介绍了一种船载光电稳定跟踪伺服系统,着重介绍了功率驱动器与基于TMS320F28335 DSP的数字伺服控制器的设计与实现,简单介绍了系统软件设计和电磁兼容设计。工程实践结果表明:该系统具有较快的动态响应和较强的抗干扰性,能有效地隔离船体摇摆扰动,对类似的工程设计具有一定的参考意义。
关键词:稳定跟踪;TMS320F28335;数字伺服控制器;电磁兼容
船载光电稳定跟踪伺服系统的主要任务是隔离浪涌引起的船体摇摆,同时完成对目标的精确跟踪。本系统通过光纤速率陀螺反馈构成速率稳定环路,敏感船体角速率变化,反方向补偿该速率的变化,保证光电负载瞄准线稳定;同时接收上位机或者光电传感器发送的位置偏差指令,控制负载框架使光电设备准确跟踪目标,实现稳定跟踪功能。
1 系统组成
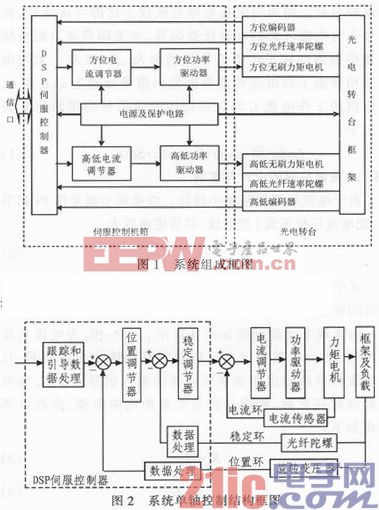
系统由伺服控制机箱和光电转台两大部分组成,其中伺服控制机箱由箱体、电源及保护电路、DSP伺服控制器、电流调节器、功率驱动器组成;光电转台为两轴系,无刷直流力矩电机、测角编码器分别套轴安装在光电转台上,方位轴系、高低轴系分别独立安装一套光纤速率陀螺,感应本轴系的角速率。系统组成框图如图1所示。
2 系统的设计与实现
2.1 系统控制结构
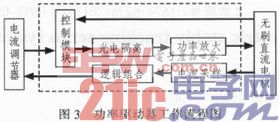
为了实现系统的高精度和高可靠性,系统控制结构采用多环路串级控制方案,其系统单轴(方位轴、高低轴)控制结构图如图2所示,位置调节器和稳定调节器由DSP伺服控制器实现数字调节,采用该设计方案既能充分发挥DSP伺服控制器的高速数据处理能力,又能简化电路,增加系统设计灵活性。
2.2 功率驱动器设计与实现
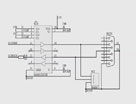
作为无刷直流力矩电机的直接驱动部件,功率驱动器的性能对整个伺服系统的性能具有决定性作用。功率驱动器是将电流调节器的控制误差信号进行功率放大,以驱动电机带动负载转动。本系统功率驱动器主要由基于MC33035的无刷电机控制模块、基于高速光耦HCPLA504的光电隔离电路、基于三菱PM25RAL120的功率放大模块和电流采样电路、逻辑组合电路组成,具有抗干扰性强、可靠性高、稳定性好等优点。功率驱动器工作流程图如图3所示,虚框内为功率驱动器。
控制模块接收外部控制信号(包括无刷电机转子位置传感器信号、控制模块使能信号、刹车控制信号、电机旋转方向信号和误差控制信号等),产生驱动模块需要的6路原始驱动控制信号。6路原始驱动控制信号经过光耦隔离由功率放大模块进行功率放大,驱动无刷直流力矩电机。

pid控制器相关文章:pid控制器原理






评论