无线传感网络时间同步研究进展与分析

摘要:简要阐述近年来无线传感网络时间同步算法的发展情况和影响无线传感网络时间同步的因素后,重点介绍了目前几种比较典型的时间同步算法,并对其精度、功耗以及各自的优缺点进行了较详细的分析。在特定的网络中,应该对精度与功耗进行折中考虑。最后探讨了未来可能的发展方向。
关键词:时间同步;典型时间同步算法;误差分析
引言
保持节点之间时间上的同步在无线传感器网络中非常重要,它是保证数据可靠传输的前提。NTP协议是目前因特网上采用的时间同步协议标准,功耗大,采用有线传输,不适合用于功耗、成本受限制的无线传感网络中。GPS系统也可以提供高精度的时间同步,但它的信号穿透性差,GPS天线必须安装在空旷的地方,功耗也较大,所以不适合无线传感网络。
Elson等人2002年首次提出无线传感器网络时间同步的研究课题以来,已有相当多的典型时间同步算法,主要可以分为以下几类:基于发送者一接收者的双向同步算法,典型算法如TPSN(Timing-Sync Protocol for Sensor Networks)算法;基于发送者一接收者的单向时间同步算,典型算法如FTSP(Flooding Time Synclaronization Protocol)算法、DMTS(Delay Measurement Time Synchronization)算法;基于接收者一接收者的同步算法,典型算法有RBS(Reference Broadcast Synchronization)算法。
近年来根据以上几种典型同步算法,还有人提出了分簇式的层次型拓扑结构算法,以及结合生成树等来提高整个网络的性能,如LTS(Li-glatweight time synchronization)算法、CHTS(Cluster-based Hierarehical Time Synchronization)算法、CRIT(Chained-Ripple Time Synchronization)算法、PBS(The Pairwise Broadcast Synchronization)算法、HRTS(Hierarchy ReferencingTime Synchronization Pro-toc01)算法、BTS(Broadcasttime synchronization)算法、ETSP(Energy-efficient Time Synchronization Protocol)算法等。
然而,无论以上同步算法怎样发展,精度如何提高,整个网络功耗怎样降低,都是基于单跳时间同步机制。随着无线传感网络的运用与发展,传感节点体积不断缩小,单跳距离变小,整体网络规模变大,同步误差的累积现象必将越来越严重,目前也有比较新的同步算法,试图尽量避开单跳累加来解决这些问题,如协作同步。
1 时间同步
1.1 时间同步不确定性的影响因素
时间同步不确定性的主要的影响因素如图1所示。
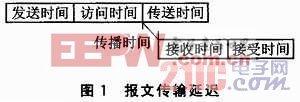
发送时间:发送方用于构造分组并将分组转交给发送方的MAC层的时间。主要取决于时间同步程序的操作系统调用时间和处理器负载等。
访问时间:分组到达MAC层后,获取信道发送权的时间。主要取决于共享信道的竞争、当前的负载等。
传送时间:发送分组的时间,主要取决于报文的长度等。
传播时间:分组离开发送方后,并将分组传输到接收方之间的无线传输时间。主要取决于传输介质、传输距离等。
接收时间:接收端接收到分组,并将分组传送到MAC层所需的时间。接受时间:处理接收到分组的时间。主要受到操作系统的影响。
1.2 典型时间同步算法分析
1.2.1 TPSN算法分析
TPSN算法采用的是层次型的网络结构,是基于发送者一接收者的双向同步算法。分成两个阶段,第一阶段为层次发现阶段,第二阶段为同步阶段。T1、T4用来记录同步节点的本地时间,T2、T3用来记录参考节点的本地时问。同步节点A在T1时刻向参考节点B发送一个同步请求报文,报文中包含了同步节点的级别和T1。当参考节点B收到报文后,记录下接收时刻T2,并立即向同步节点A回复一个同步应答报文,该报文中包含了参考节点B的级别和T1、T2及回复时刻T3。同步节点A收到参考节点的回复后,记下时刻T4。假设来回报文的传输延迟相同都为d,且m为同步节点在T1时刻两者之间的时偏,且设来回时偏相同,由T2=T1+m+d,T4=T3-m+d可得到:
![]()
则在T4时刻,若在同步节点A的本地时间增加修正量m,就能达到同步节点A与参考节点B之间的同步。




评论