基于SAR系统的无人机定位导航系统的设计

引言
本文引用地址:https://www.eepw.com.cn/article/155684.htm无人飞机与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点,备受世界各国军队的青睐。无人驾驶飞机以其准确、高效和灵便的侦察、干扰、欺骗、搜索、校射及在非正规条件下作战等多种作战能力,发挥着显着的作用,并引发了层出不穷的军事学术、装备技术等相关问题的研究。
高空长航时无人机的飞行高度利于观测星体,为此,考虑在惯性/SAR 组合基础上,采用惯性导航和星光组合,可以为SAR 成像提供高精度的姿态信息,提高SAR 成像质量。
本文以长航高空无人机成像期间对导航高精度要求为应用背景,开展了基于SAR 辅助的惯导/星光组合导航研究,结合SAR 工作的非连续特性,设计了SAR/惯导/星光组合导航定位方案,提出了非同步输出多传感器异步集中卡尔曼滤波算法,可有效提高导航定位系统的自主性和精度。
1 卡尔曼滤波器设计
设位移 s 时,飞机的位置坐标为X (s),对于不同的位移值,均有一个X (s)值与之对应,当取样位移不间断变化时,就得到位置坐标序列{X (s),X(s+1)……},飞机位置预测序列{X (s+1),X(s+2)……},该序列是系统噪声等驱动的一阶递归模型,在x 轴方向推导状态方程如下:

测量方程如下:

Zx (s)为s位移时飞机坐标x轴向的测量值。
H 为测量参数,它是由测量系统和测量方法所确定,不随位移变化的一个常数,因为是单模型,取为1,V(s)为测量噪声。
均方估计误差为Px (s+1) = E[Xx (s +1) — Xx (s)]2,在均方估计误差为最小的准则下,通过数学推导,即可得出飞机自动控制的卡尔曼滤波公式,如下:
预估计方程:

计算卡尔曼滤波增益,得:

均方预测误差方程:

同理,可以推导y,z 轴向的状态方程,则飞机位置的状态方程如下:
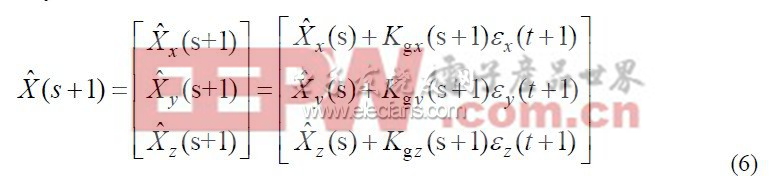
卡尔曼滤波是以预测加修正来实现滤波递推的,其这个性质,很容易通过计算机仿真实现,从而可以完成对飞机位置的预测,预估计方程:

同时,与地面基站雷达测量值进行比对,调飞机因为机械振动等原因造成的位移偏差,其滤波模型为:
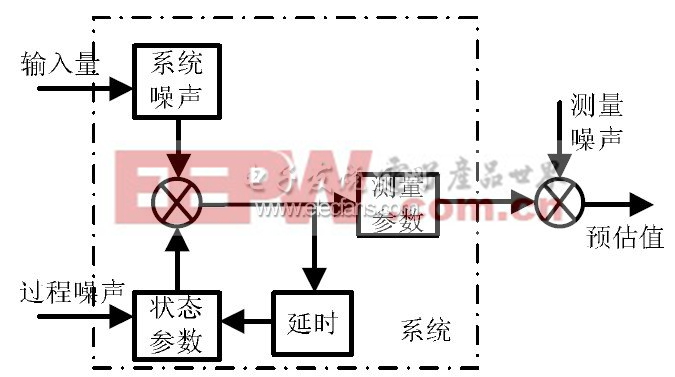
图 1 卡尔曼滤波的系统模型框图









评论