基于SAR系统的无人机定位导航系统的设计
SAR 图像导航虽然具备较高的定位精度和自主性,但是其成像时仅能部分时段工作,而且对系统的姿态水平精度要求较高,而基于星敏感器的星光导航系统具有很高的姿态测定精度,因此,在采用惯导/星光姿态组合的同时,分时段地接入SAR 图像导航信号,能够保证系统具有较高的定位精度和定姿精度。考虑到SAR 图像导航仅能分时段工作,在实际应用过程中主要根据任务需要接入SAR 图像导航系统,本文设计了如图2 所示的基于SAR辅助的惯导/星光姿态组合导航系统。
将惯性导航系统与卫星定位、地理信息系统、里程仪组合构成的导航定位系统,既具有惯性导航的自主性、实时性又具有卫星定位系统的高精度、误差无积累等优点,有效地克服了惯性导航系统的累积误差和漂移误差,提高了系统的精度和可靠性。组合导航定位系统多用光学陀螺、机械陀螺和加速度表构成捷联式惯性导航,以地理信息匹配、卫星定位信息、里程计信息等为辅,惯导信息为主,采用卡尔曼滤波技术实现信息的最优综合以获得最佳的导航定位参数。
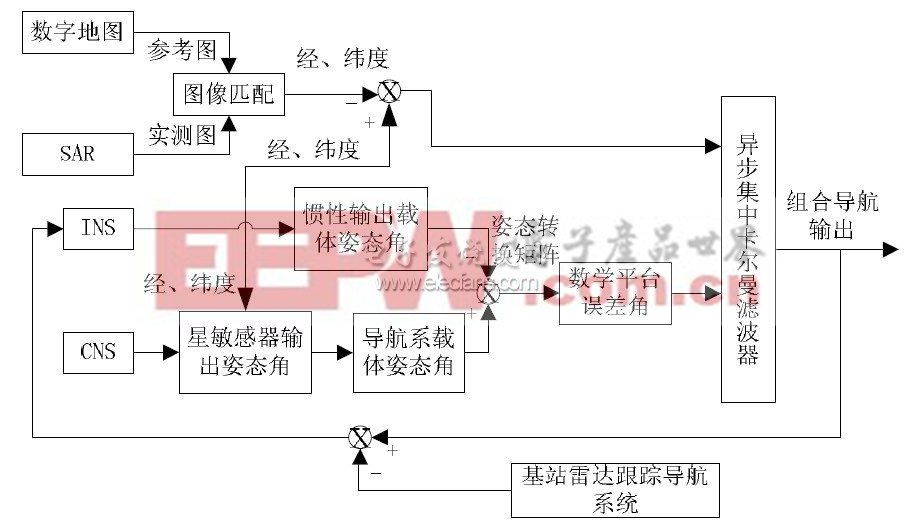
图2 基于SAR 辅助的惯导/星光组合导航系统
从图 1 可以看出:SAR 辅助的组合导航系统由按照任务需要可以灵活接入的SAR 图像导航、惯导/星光姿态组合导航部分和地面基站雷达跟踪系统三部分构成,激光陀螺捷联惯导组合最主要的特点是采用了激光陀螺技术,与机械陀螺相比,激光陀螺无需模数转换脉冲输出,是捷联式惯导系统的理想元件,而且构成捷联惯导系统的惯性敏感元件直接与载体相连,省去了结构复杂的机械平台,因而较机械惯导系统体积小、重量轻、可靠性高;此外激光陀螺捷联惯导组合还具有抗干扰能力强、启动时间短等技术特点,符合飞机快速飞行以及在强电磁干扰背景下精确定位的实际需求,在导航精度、环境适应能力、可靠性等方面可以很好地满足了使用要求。雷达跟踪系统导航输出通过无线模块发送给无人飞机,其信号与组合导航输出的信号构成反馈信号。系统综合运用激光陀螺捷联惯导、光学测距测角、卫星定位、无线通信、数字地图和地理信息处理,基站式雷达跟踪等多项技术,采用组合导航系统和自主式快速标定方法。
3 具体实现
飞机首先通过激光陀螺组合定位定向导航系统实现绝对位置、方向基准的建立和动态保持,并结合地面基站的雷达系统定位结果进行误差消除,具体实现过程描述如下:
(1)绝对位置和方向基准的确定:飞机处于停机状态,组合定位导航系统寻北、初始对准,通过激光陀螺、加速度计分别测量地球自转角速度矢量与重力场矢量方向,根据所在纬度区域,确定真北方向。位置基准的确定是利用卫星定位系统、数字地图或地理信息得到的。
(2)位置和方向基准的动态保持:组合定位导航系统寻北、初始对准完成后,进入定位定向导航状态。在飞机飞行过程中,实时测量激光陀螺载体在惯性空间中的姿态,从而可计算出惯性组合坐标系与当地水平地理坐标系的转换关系,实现动态方向基准保持。同时,利用里程仪信息实现组合导航,确定飞机的位置变化。
(3)地面基站实时定位导航:地面设置多个基站,基站负责对飞机实时定位,并通过无线模块将位置信息和速度信息发送给飞机。
(4)误差消除:SAR 辅助的组合导航系统输出与地面雷达定位输出形成定位误差和速度误差,将定位误差作为惯性导航系统的输入,形成一个闭环系统,进行误差的消除。误差消除过程中最关键的问题在于解决多传感器组合导航系统存在SAR 和星光信息的输出不同步的问题,为此采用异步集中卡尔曼滤波器处理不同频率信息的同步问题。
4 结论
飞机导航定位工作主要由组合定位定向导航系统完成,组合导航系统实时闭环输出位置和姿态信息,为飞机提供精确的方向基准和位置坐标,同时实时根据姿态信息对飞机飞行状态进行预测。组合导航系统由激光陀螺捷联惯性导航、卫星定位系统接收机、组合导航计算机、里程计、高度表和基站雷达系统等组成。结合了SAR 图像导航的定位精度、自主性和星敏感器的星光导航系统的姿态测定精度,从而保证了无人飞机的自主飞行。











评论