基于WiFi的远程视频传输智能机器人设计

摘要 WiFi以其强大的覆盖范围和更高的传输速率得到广泛应用。文中研究了无线视频传输技术在机器人中的应用。文中设计的WiFi机器人是以WiFi无线网络为数据传输载体,实现实时控制、音视频传输和图像采集等功能的智能系统。经测试,该机器人可用于在反恐侦查、战场C4ISR系统、消防救灾、生命探测等民用及军事领域。
关键词 WiFi;机器人;远程视频传输;数据采集
WiFi是一种无线局域网运用技术,其出现以来,凭借组网方便、易于扩展等特点,有着广泛的应用前景。而无线接入和高速传输是WiFi的主要技术优点,WiFi技术与机器人技术的结合便产生了WiFiRobot。WiFi Robot是集远程无线通讯、音视频传输、数据采集、多向机械云台、灯光控制、环境检测、超声波测距、红外壁障、超声波领航、动力四驱、摄像头云台等功能为一体的多功能智能遥感机器人,以WiFi网络作为数据传输平台,以高速MCU为数据处理中心,可通过电脑、智能手机、平板电脑等设备进行远程控制,并可拓展更多功能。
1 基本原理
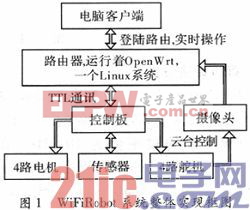
设计的机器人所要实现的功能为:操作员在操作终端通过WiFi无线网络连接到小车内置的WiFi模块上,并向其发出相关操作指令,WiFi模块接收指令并传递给内置的单片机,单片机通过控制电路让机器人执行相应的指令;同时,安装在机器人上的各种传感器和摄像头可以通过WiFi网络将数据反向传递给操作终端,从而实现上下行控制及双向通信,以便操作员实时了解机器人周围的环境,并根据环境情况发出指令控制机器人执行特定的任务,实现交互式操作,图1为系统整体实现框图。
2 硬件设计
硬件系统由车体部分、路由器、摄像头及云台、驱动板、红外壁障、车灯部分等构成。
(1)车体部分。车体部分主要由4个12 V/120转直流电机和电池组构成,电机两两并联,相当于驱动两个电机。为方便电池充放电,设计了充放电电路,只需拨动开关即可实现充放电操作。电池组电源12 V,可多个并联使用,为机器人提高持久动力。
(2)摄像头及云台。摄像头选择高质量高清摄像头进行监控,摄像头满足0°~180°水平,0°~180°上下旋转,可以远程打开或关闭。摄像头型号为索尼PS2,通讯接口为USB协议。云台由2个MG995数字舵机及其他辅助材料构成。
(3)路由器(WiFi模块)。WiFi模块采用TP—LINK全新推出的150 Mbit·s-1迷你型3G无线路由器。该路由器具有尺寸小,供电电压低的特点。其供电电压只有5 V,且支持OpenWrt。OpenWrt是一个基于Linux的开源路由固件,提供了一个完全可写的文件系统及软件包管理,对支持OpenWrt的路由器刷机后,其相当于一个Linux小系统。路由器选择OpenWrt作为操作系统,将USB摄像头采集的现场图片发给远端的PC控制终端,并将上位机发出的命令通过串口转发给单片机控制系统。
(4)驱动模块。控制板主要包括电源模块、电机驱动、舵机驱动、下载串口、单片机电路、红外壁障、车灯控制以及数据通信接口等。在此主要介绍电机驱动和舵机驱动两个驱动模块。电机驱动采用英飞凌公司的BTS7960直流电刷电机驱动芯片,其具有大电流MOSFET半桥结构。芯片具有较高的集成度和足够的输出能力,并在能耗方面具有优势。在集成化和小型化的电机控制系统中,适合作为理想的电机驱动芯片。
图2为BTS7960与单片机组成的H电机驱动单元。由于所采用驱动芯片是半桥,因此需要采用两片以构成全桥实现电机的正反转。
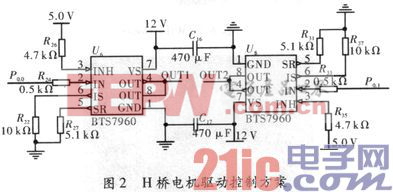
单片机产生2路PWM输出作为两片BTS7960的控制信号,同时要求PWM0、PWM1不能同时为高电平。采用定时器输出硬件PWM脉冲,使得单片机CPU只在改变PWM占空比时参与运算,这样可大幅减轻系统运算负担和PWM软件编程成本。

路由器相关文章:路由器工作原理
路由器相关文章:路由器工作原理








评论