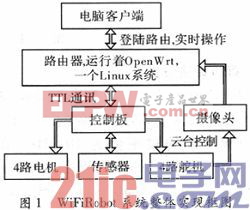
- 摘要 WiFi以其强大的覆盖范围和更高的传输速率得到广泛应用。文中研究了无线视频传输技术在机器人中的应用。文中设计的WiFi机器人是以WiFi无线网络为数据传输载体,实现实时控制、音视频传输和图像采集等功能的智能系
- 关键字:
智能机 器人 设计 传输 视频 WiFi 远程 基于
- 0 引言随着控制技术、计算机技术、信息处理技术和传感器技术的发展,智能机器人无论是在工业领域还是消费电子领域都已经扮演了非常重要的角色,已成为人工智能研究和发展的热点之一。在语音控制机器人领域,有研究表
- 关键字:
器人 设计 智能机 多功能 单片机 基于
- 0 引言随着控制技术、计算机技术、信息处理技术和传感器技术的发展,智能机器人无论是在工业领域还是消费电子领域都已经扮演了非常重要的角色,已成为人工智能研究和发展的热点之一。在语音控制机器人领域,有研究表
- 关键字:
方案 解析 设计 总体 器人 智能机
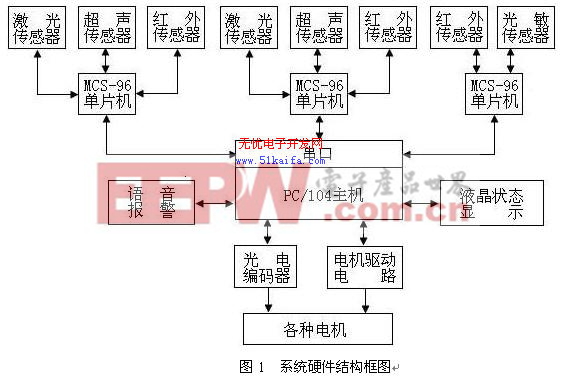
- 1、设计思想与总体方案1.1 简易智能机器人的设计思想本机器人能在任意区域内沿引导线行走,自动绕障,在有光源引导的条件下能沿光源行走。同时,能检测埋在地下的金属片,发出声光指示信息,并能实时存储、显示检测
- 关键字:
应用 设计 器人 智能机 简易
- 0 引言智能机器人研究在当前机器人研究领域具有十分突出的地位,其显著的特点是具有环境感知、判断决策、人机交互等功能。具体地说,应该具有可移动性,能根据命令或需要到达指定工作地点或区域;应具有图像识别能力
- 关键字:
器人 研究 智能机 轮式 分布式 控制系统 基于
- 机器人目前应用十分广泛,在工业、科研、医学等领域发挥了重要作用。我们知道,机器人的指令需要我们来提供。目前,工业机器人的指令一般都是通过示教盒输入的。示教盒提供了简单的人机界面,可以帮助完成简单的示教
- 关键字:
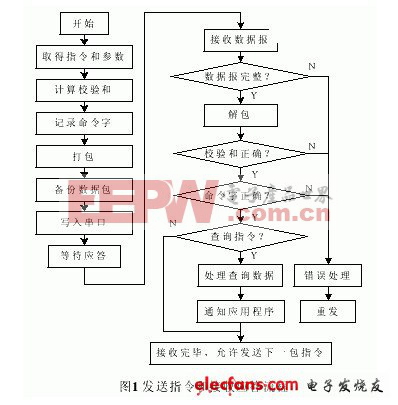
协议 设计 通信 器人 加工机 激光
- 引言 随着微电子技术的不断发展,很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。目前人们已经完全可以设计并制造出具有某些特殊功能的简易智能机器人。 1 设计思想与总体方案
1.1 简易
- 关键字:
器人 智能机 简易 实现 单片机

- 摘要:给出了一种由说话者说出控制命令,机器人进行识别理解,并执行相应动作的实现技术。在此,提出了一种高准确率端点检测算法、高精度定点DSP动态指数定标算法,以解决定点DSP实现连续隐马尔科夫模型CHMM识别算法
- 关键字:
技术 识别 语音 器人 智能机
- 我们从广泛意义上理解所谓的智能机器人,它给人的最深刻的印象是一个独特的进行自我控制的活物.其实,这个自控活物的主要器官并没有像真正的人那样微妙而复杂。智能机器人具备形形色色的内部信息传感器和外部信
- 关键字:
实现 设计 系统 器人 智能机
- 摘要:机器人在军事侦察、扫雷排险、防核化污染等危险与恶劣环境中以及工业自动化生产的物料搬运上应用很广,随着任务复杂性的增加,对移动机器人的要求也越来越智能化。然而,功能较完备的路径跟踪控制方法普遍具
- 关键字:
迷宫 设计 器人 智能机 MCS-51 单片机 基于
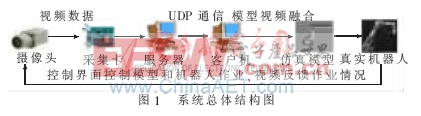
- 针对遥操作机器人系统中视频传输数据量大,造成的时延严重影响操作者决策,使机器人现场作业透明度不高引起误操作的问题,提出采用3DSMAX建立三维机器人仿真模型,在OPENGL编程环境下对其进行绘制及仿真控制,采用H.263标准及相应压缩算法把获取视频压缩、传输、解压、远端显示与仿真模型融合。实验证明,该方法不仅能实现控制命令准确传输、机器人实时控制,而且视频机器人跟踪仿真模型轨迹作业避免了误操作。
- 关键字:
系统 应用 器人 操作机 融合 视频

- 引 言
移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为移动式机器人研究的一个主要方向。自平衡机器人采用水平布置的两轮结构,本身是一个不稳定体。也
- 关键字:
设计 控制系统 器人 平衡机
- 分析了焊接机器人系统中的电源电路,详细论述了其启动电路、触发电路、过压报警及保护电路工作原理,并给出了具体电路图。
- 关键字:
电路 分析 电源 系统 器人 焊接机
器人介绍
您好,目前还没有人创建词条器人!
欢迎您创建该词条,阐述对器人的理解,并与今后在此搜索器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473