基于WiFi的远程视频传输智能机器人设计
线性稳压器具有输出电压恒定或可调、稳压精度高的优点,但是由于其线性调整工作方式在工作中会造成较大的“热损失”,导致其电源利用率不高、工作效率低下,不易达到便携式设备对低功耗的要求。因此为保证较高的电源利用率,舵机驱动采用LM2596开关型稳压芯片实现,它可以提供3 A以上电流,驱动强劲。图3给出了舵机驱动方案。本文引用地址:http://www.eepw.com.cn/article/153531.htm
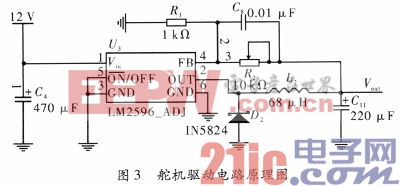
由于舵机型号为MG995,其工作电压为5.0 V~7.0 V。因此舵机驱动芯片选择了可调LM2596-ADJ芯片,其输出电压Vout=Vref(1.0+R2/R1),其中,Vref=1.23 V为芯片内部参考电压。
3 软件设计
软件部分是机器人智能化的体现,它控制WiFiRobot所有的运行状态。整个软件系统体系结构如图4所示。
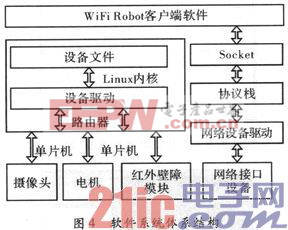
操作系统采用OpenWrt,此部分在路由器刷机部分完成,主要完成视频采集、数据传输、转发等功能。上位机软件控制灯光控制、拍照、实时控制机器人运动等行为。下位机软件通过接收来自上位机的命令,从而执行相应操作。而连接上位机和下位机之间的纽带就是通信协议,软件部分包括通信协议,客户端控制软件和下位机软件。在此主要介绍通信协议和上位机的开发。
3.1 通信协议
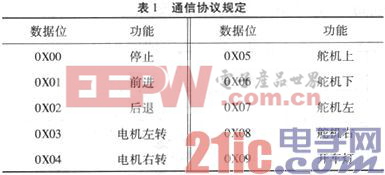
上位机采用数据包格式传送指令,也可以采用单字符的形式发送,由于单字符通信方式干扰较大,因此采用数据包格式传送指令,包头用OXFF,包尾用OXFF,无校验位。上位机利用无线网卡通过Socket发送数据包到路由器,路由器通过解包机制把数据包解开,通过串口发送到单片机并通过控制模块执行相关操作。其协议规定如表1所示。

路由器相关文章:路由器工作原理
路由器相关文章:路由器工作原理













评论