嵌入式电梯群控系统设计

目前,大多数电梯公司的群控系统都是采用RS485总线进行通信,但RS485采用主从式的通信方式,由主机发起呼叫,对应的终端应答,因此只能采取轮询的通信方式,实时性差,一旦主机出现故障,整个系统将瘫痪;而CAN总线在电梯群控系统中却体现出更多的优势:CAN总线通信与RS485通信相比抗干扰能力更好;可连接较多的通信节点;通信速率更高;实时性与稳定性高,所以本文采用CAN总线来实现群控主机和各电梯之间的通信[2]。
1 系统总体结构
本系统以ARM7为内核,主频达72 MHz的32 bit微处理器LPC2368作为群控主控制器,它有高达512 KB的片内Flash程序存储器,具有在系统编程(ISP)和在应用编程(IAP)功能,同时LPC2368内部集成了2个CAN控制器,CAN控制器提供了一个完整的CAN协议(遵循CAN规范V2.0 B)实现方案。包含这个片内CAN控制器的微控制器用来构建功能强大的局域网,支持极高安全级别的分布式实时控制,可以用在汽车、工业环境、高速网络和低价位多路连线的应用中。系统还选用了CAN总线收发器MPC2551,它可作为CAN控制器与物理总线接口,提供对总线的差动发送和接收能力。
2 通信模块设计
2.1 通信模块硬件实现
本系统采用LPC2368内部集成了的CAN控制器和高速CAN收发器MPC2551配合实现群控主机和各电梯之间的通信任务的,CAN模块由2个部分组成:控制器和接收滤波器,所有的寄存器和RAM都作为32 bit的字来访问。LPC2368的CAN控制器具有如下的特点:2个控制器和总线;支持11 bit和29 bit的标识符;双重接收缓冲器和三态发送缓冲器;可编程的错误报警界限和可读/写访问的错误计数器;仲裁丢失捕获和错误代码捕获(带有详细的位位置);单次触发的发送(不会重复发送);只听模式(无应答、无活动错误标志);“自身”报文的接收(自接收请求)[3]。
LPC2368的接收滤波器有如下的特点:快速硬件实现的搜索算法,支持大量的CAN标识符;全局验收滤波器识别所有CAN总线的11 bit和29 bit Rx标识符;允许11 bit和29 bit CAN标识符的明确定义和分组定义;验收滤波器可以为选择的标准标识符提供FullCAN-style自动接收。
高速CAN收发器MPC2551是一个可容错的高速CAN器件,可作为CAN协议控制器和物理总线接口。MCP2551可为CAN协议控制器提供差分收发能力,它完全符合ISO-11898标准,包括能满足24 V电压要求。其工作速率高达1 Mb/s。典型情况下,CAN系统上的每个节点都必须有一个器件,把CAN控制器生成的数字信号转化为适合总线传输(差分输出)的信号。它也为CAN控制器和CAN总线上的高压尖峰信号之间加入了缓冲器,这些高压尖峰信号可能是由外部器件产生(EMI、ESD和电气瞬态等)。
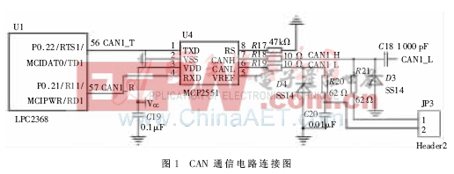
本系统设计的电路中,2个二极管D3与D4可有效地抑制传输介质的浪涌干扰,由于电梯群控系统中存在多个CAN通信节点,因此本电路中加入了终端电阻跳线JP3,由用户灵活地选择是否在该节点处加入终端通信电阻,本系统设计的CAN通信电路连接如图1。
2.2 通信协议及通信软件设计
2.2.1 CAN总线帧种类
CAN总线上传输的信息称为报文,报文传输按照帧结构的不同,通常可表示为如下5种不同类型的帧:
(1)数据帧:用于发送单元向接收单元传送数据的帧;
(2)遥控帧:用于接收单元向具有相同ID的发送单元请求数据的帧;
(3)错误帧:用于当检测出错误时向其他单元通知错误的帧;
(4)过载帧:用于接收单元通知其尚未做好接收准备的帧;
(5)帧间隔:用于将数据帧及遥控帧与前面的帧分离开来的帧。







评论