IIR滤波器零相位数字滤波及其应用

摘要: 本文介绍了一种利用Delphi7实现数字滤波器零相位滤波的方法,与一般差分滤波方法相比,该方法不仅可以避免相移,而且还能改善起始部分的波形畸变,这一点在信号处理中具有重要的应用价值。
关键词: 虚拟仪器信号处理零相位数字滤波
Zerophase Digital Filter and Application
Fan XinhaiAn GangZhang Chuanqing
Abstract: This paper introduces a method to realize zerophase filtering for digital filters using Delphi7. Comparing with general difference filter, the zerophase digital filter can not only avoid phaseshifting, but also improve the wave aberration of section start. This method has important practical value in signal processing.
Keywords: virtual instrument, signal processing, zerophase digital filtering.
0引言
在动态测试信号处理过程中,滤波器是常用的测试仪器之一。它常被用于抗混滤波,以避免傅立叶变换时在频域产生混叠,或从具有多种频率成分的复杂信号中,将感兴趣的频率成分提取出来,而将不感兴趣的频率成分衰减掉。在传统测试仪器中,滤波器的功能通常需要依靠硬件系统来实现。
随着数字信号处理技术的不断完善,计算机硬件技术的日新月异以及软件技术飞速发展,测试仪器系统的设计思想发生了重大改变。部分传统的专用测试设备会逐步被以计算机和应用软件为核心的虚拟仪器所代替[1]。虚拟仪器的出现标志着“软件即仪器(The soft is the instrument)”时代的到来。在计算机辅助测试系统(CAT,Computer Aided Test)中,以往模拟滤波器(AF,Analog Filter)的功能,可用数字滤波器(DF,Digital Filter)来替代。数字滤波器的实现不但比模拟滤波器容易的多,而且还能获得较理想的滤波器性能。
2数字滤波器的时域描述与分类
对于一个线性移不变(LSI,Linear Shift Invariant)离散时间系统,如图1所示,可用如下差分方程表示:y(n)+∑Nk=1a(k)y(n-k)=∑Mr=0b(r)x(n-r)(1)式中a(k),b(r)为方程系数。
图1LSI系统
如果a(k),k=1,2,Λ,N不全为零,该系统为无限冲击响应(IIR)系统。若a(k)均为零,并令b(0)=1,则y(n)=∑Nr=1b(r)x(n-r)+x(n)(2)该系统为有限冲击响应(FIR)系统。
由此,数字滤波器在从实现方法上,有IIR滤波器和FIR滤波器之分。这两类滤波器无论在性能上,还是在设计方法上都有着很大的区别。IIR数字滤波器与FIR滤波器相比,前者保留了模拟滤波器的优点,幅频特性较好,但存在相位失真。后者相频特性较好,可实现线性相位,但在相同指标要求下要比前者的阶数高的多。
3差分数字滤波及其存在的问题
IIR数字滤波器的设计方法主要有双线性Z变换法和冲激响应不变法;FIR数字滤波器的设计方法主要有窗函数法、频率抽样法和切比雪夫逼近法等。有关数字滤波器设计的详细方法见文献[2],这里就不再赘述。
对于设计好的滤波器,确定出滤波器的系数,通过对差分方程式(1)或式(2)的叠代算法,可以实现IIR滤波器或FIR滤波器的数字滤波。考虑到程序的通用性,这里就按式(1)编写一个差分滤波函数DiffFilter(b,a,x),调用参数为三个数组,b用于存放滤波器的系数b(r)(r=0,1,…,M);a用于存放滤波器的系数a(k)(k=0,1,…,N),且a(0)=1;x用于存放输入信号,返回后用于存放滤波后的输出信号。如果将调用参数a均赋零值,则可实现FIR滤波器的数字滤波。
在此,用一实例进行说明。图2为某型坦克发动机转速1000rpm时,在排气口测得的噪声信号(采样点数1024,采样频率4KHz)。从信号的波形可以看出,它具有一定的周期性,主要是以发动机周期性排气产生的噪声为主。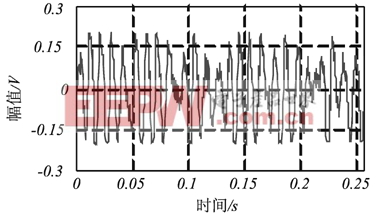
图2某型坦克发动机噪声信号
采用窗函数(Hanning窗)法设计出某200阶FIR低通滤波器,截止频率为200Hz,分析频率为2KHz,其幅频曲线及相频曲线如图3所示。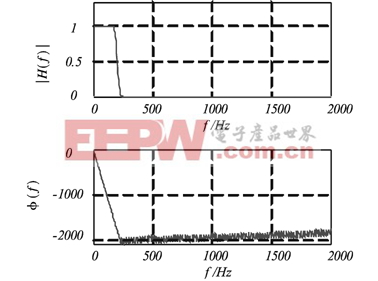
图3低通滤波器的幅频特性和相频特性
利用该FIR低通数字滤波器对图2所示发动机噪声信号进行差分滤波,滤波后的波形如图4所示。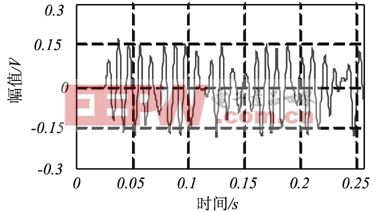
图4差分滤波后的发动机噪声信号
对比图3和图4所示波形可以看出,差分滤波后,信号变得“光滑”了许多,原来的“毛刺”被滤掉了。但同时也可以看出差分滤波方法存在两个问题:一是滤波后的信号相对与原信号而言,发生了相移;二是滤波后的信号在起始部分,波形畸变较为严重。在信号处理中,如果对信号的相位有特殊的要求,相移问题需要引起高度的注意。而起始部分的畸变是由于叠代过程中,没有考虑滤波器的初始条件,刚开始点数少,没能用到滤波器全部系数的缘故。大多情况下,这种畸变可以接受,但当数据较短,而滤波器的阶数又较高时,这种畸变会带来较大的负面影响。
如果输入信号为一单位脉冲信号,即
x(n)=1,n=1
0,n≠1
那么,滤波器的输出为其脉冲响应。本文所用200阶FIR低通数字滤波器的脉冲响应如图5所示。
图5滤波器的脉冲响应3零相位数字滤波算法及其实现

滤波器相关文章:滤波器原理
滤波器相关文章:滤波器原理
低通滤波器相关文章:低通滤波器原理
电源滤波器相关文章:电源滤波器原理
数字滤波器相关文章:数字滤波器原理







评论