TMS320C31和80C196双CPU构成的高速实时控制

介绍了采用TMS320C31和80C196双CPU构成的高速实时控制系统的基本构成,给出了TMS320C31、80C196与双口RAM IDT7140之间的接口电路,IDT公司双口RAM系列的中断逻辑设计以及DPS与80C196之间采用双口RAM进行高速数据通信的软件实现。该控制系统可应用于对实时性要求很高的系统中。
本文引用地址:https://www.eepw.com.cn/article/151089.htmDSP也称数字信号处理器。TMS320C31是TI公司的第三DSP芯片,它的基本结构包括:(1)程序文凭间与数据空间分开的总线结构,可以对程序存储器和数据存储器这两个独立的存储器进行独立编址、独立访问;(2)流水线结构,以三级流水线操作为例,在每个指令周期内,三条不同的指令都处于激活状态,但处于不同的阶段,分别为取指、译码和执行;(3)专用的硬件乘法器,使乘法可以在单周期内完成;(4)特殊的DSP指令;(5)快速的指令周期,可以达到33.3ns,即每秒能执行60M条指令。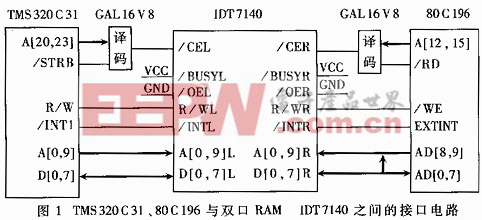
由一片TMS320C31加上存储器、模/数转换单元和外设接口就可以构成一个完整的控制系统,但这种方案若要达到高速实时控制则是不可行的。因为TMS320C31除要完成复杂的算法,还要采集处理数据、控制外部系统中的执行机构和实现人机接口等功能,而这些工作势必会大大延长系统对控制对象进行控制的周期。所以我们采用TMS320C31和一个通用微处理器80C196一起来作为这个高速实时控制系统的CPU。其中80C196作为主机,负责数据的采集处理、外部系统中执行机构的控制和驱动以及人机接口等功能;TMS320C31作为从机,负责复杂算法的实现。这样可以使TMS320C31专注于算法的计算,充分利用它高速数据处理的能力。TMS320C31与80C196之间通过双口RAM进行高速数据通信,之所以采用双口RAM是因为这种通信方式数据传输的速率很高,并且抗干扰性能较好。
1 系统构成
系统主要由两大模块组成:算法模块和输入输出控制模块。算法模块以TMS320C31为核心构成,是整个系统的计算中心,负责复杂算法的实现;输入输出控制模块以80196为中心构成,负责数据的采集处理、外部系统中执行机构的控制和驱动以及人机接口等功能。算法模块与输入输出控制模块之间通过双口RAM IDT7140进行高速数据通信。算法通过从输入输出控制模块处获得算法所需的输入数据(即实时采样到的数据),然后将计算结果送给输入输出控制模块,最后再由输入输出控制模块控制各执行机构。
2 TMS320C31、80C196与双口RAM IDT7140之间的接口电路
如图1所示,IDT7140有两组完全对称的地址线数据线和控制线, TMS320C31与左边这组线相连,80C196与右边的那组线相连。TMS320C31给IDT7140分配的地址空间为0x20000H~0x1003ffH。通过GAL16V8对A[20,23]和外部存取选通信号/STRB进行译码,给出IDT7140的片选信号/CEL。IDT7140通过/BUSYL和/BUSYR引脚接高电平,工作在中断方式。IDT7140的中断信号/INTL可以与TMS320C31的某个外部中断引脚直接相连(这里将外部中断1即INT1分配给双口RAM IDT7140),具体原因将在第3部分进行说明。80C196给IDT7140分配地地址空间为0xA000H~0xA3ffH。通过GAL16V8对AD[12,15]和外部存储器读信号/RD进行译码,给出IDT7140的片选信号/CER。80C196的/WE在写周期为低电平,读周期为高电平,与IDT7140的R/WR定义一致,所以/WE可直接与R/WE可直接与R/WR相连,作为IDT7140右边的读之所以控制信号。IDT7140的中断引脚/INTR接到80C196的外部中断。
TMS320C31与左边这组线相连,80C196与右边的那组线相连。TMS320C31给IDT7140分配的地址空间为0x20000H~0x1003ffH。通过GAL16V8对A[20,23]和外部存取选通信号/STRB进行译码,给出IDT7140的片选信号/CEL。IDT7140通过/BUSYL和/BUSYR引脚接高电平,工作在中断方式。IDT7140的中断信号/INTL可以与TMS320C31的某个外部中断引脚直接相连(这里将外部中断1即INT1分配给双口RAM IDT7140),具体原因将在第3部分进行说明。80C196给IDT7140分配地地址空间为0xA000H~0xA3ffH。通过GAL16V8对AD[12,15]和外部存储器读信号/RD进行译码,给出IDT7140的片选信号/CER。80C196的/WE在写周期为低电平,读周期为高电平,与IDT7140的R/WR定义一致,所以/WE可直接与R/WE可直接与R/WR相连,作为IDT7140右边的读之所以控制信号。IDT7140的中断引脚/INTR接到80C196的外部中断。











评论