基于嵌入式测控系统的数字滤波方法设计

0 引言
本文引用地址:https://www.eepw.com.cn/article/149915.htm模拟信号都必须经过A/D转换才能被嵌入式控制器接收。但在干扰作用于模拟信号之后,其A/D转换结果往往会偏离真实值。因此,仅采样一次是无法确定该结果是否可信的,而必须多次采样,才能得到一个A/D转换的数据系列,然后通过某种处理,才能得到一个可信度较高的结果。这种从数据系列中提取逼近真值的软件算法,通常称为数字滤波算法。相对于硬件滤波,数字滤波的优越性在于其无需硬件且可靠性高,尤其对频率很高或很低的信号进行滤波。此外,由于对多输入通道可共用一个滤波程序,故可大大降低产品成本。
1.1 限幅滤波
首先根据被测对象确定相邻两次采样所允许的最大差值△Y,然后在每次采样后和上次有效采样值进行比较,如果变化幅度不超过△Y,则本次采样有效;否则,本次采样值被视为干扰而放弃,而以上次采样值为准。其原理可用如下公式表示:

其中,yn为第n次采样值,yn-1为第(n-1)次采样值。
实现上述过程的参考程序(返回有效的采样值)如下:
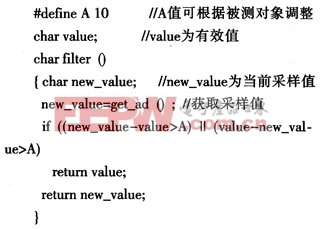
限幅滤波主要用于处理变化比较缓慢的数据,如温度、湿度、液位等。该方法使用的关键是要选取合适的门限△Y。△Y通常可根据经验数据获得,必要时也可由实验得到。
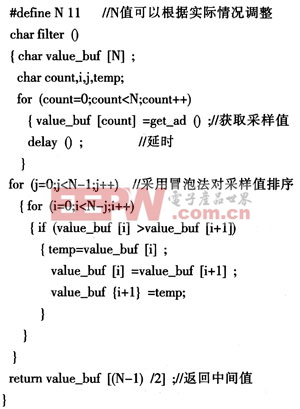
1.2中值滤波
这种滤波方式一般对目标参数连续采样N次(N一般为奇数),然后把N次采样值进行排序,再取中间值作为有效值。对于变化很慢的参数,也可以增加采样次数。而对于变化较为剧烈的参数,此法不宜采用。其参考程序如下:
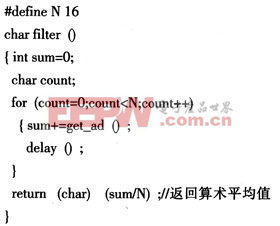
1.3算术平均滤波
该算法对目标参数先进行连续采样,然后求其算术平均值作为有效采样值。该算法适用于对具有随机干扰的信号进行滤波。这种信号的特点是有一个平均值。信号在某一数值附近上下波动。信号的平滑程度完全取决于采样次数N,采样次数越多,平滑效果越好,但系统的灵敏度也会下降。为方便求平均值,N一般取4、8、16之类的2的整数次幂,以便系统用移位法来代替除法。其参考程序如下:
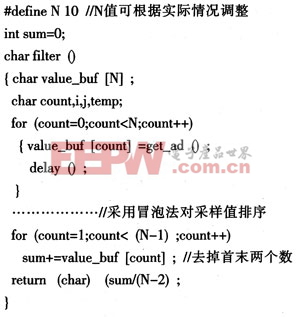
1.4去极值平均滤波
算术平均滤波不能消除明显的脉冲干扰,而只是将其影响削弱。由于明显干扰会使采样值远离其真实值,因此可以比较容易地将其剔除,而不参加平均值计算,从而使平均滤波的输出值更接近真实值,这就是去极值算法,又称为防脉冲干扰平均值滤波算法。该方法的原理是连续采样N次,并将其累加求和,同时找出其中的最大值和最小值,再从累加和中减去最大值和最小值,再按N-2个采样值求平均,即可获得有效采样值。为方便求平均值,N-2应为2、4、8、16,故N常取4、6、10、18。其参考程序如下:







评论