Cyber15队智能汽车竞赛技术报告(节选)

摘要:车模使用飞思卡尔加速度传感器MMA7260以及村田公司ENC-03陀螺仪进行卡尔曼融合,获取车模直立姿态。使用电容电感组成的谐振电路检测电磁信号幅值。通过二轮差速进行车模的转向。
本文引用地址:https://www.eepw.com.cn/article/140283.htm使用卡尔曼滤波的原因
当决定使用加速度计(反应角度)以及陀螺仪(反应角速度)以后,我们对参考的论文中为何要同时使用加速度计以及陀螺仪产生过一些疑问。因为如果需要角速度,我们可以通过![]() 这样的方法对加速度计进行微分,计算出角速度,或者可以通过对于陀螺仪
这样的方法对加速度计进行微分,计算出角速度,或者可以通过对于陀螺仪![]() 积分,从而获得角度。既然如此为何我们需要使用两个传感器。
积分,从而获得角度。既然如此为何我们需要使用两个传感器。
于是,我们对两个传感器进行了数据采样,观测其输出信号的关系。由于考虑电机转动产生的震动会对传感器产生比较大的干扰,因此我们测试了不同PWM占空比下传感器输出,并用MATLAB绘制曲线,并进行相关运算。
首先是陀螺仪的数据测试(见图1),随着PWM占空比的不断提高,陀螺仪的噪声也更加显著。
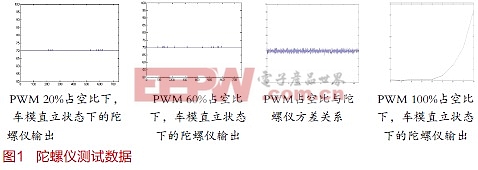
表1是我们通过MATLAB计算获得的一些数据。此处我们用方差表征传感器噪声大小。
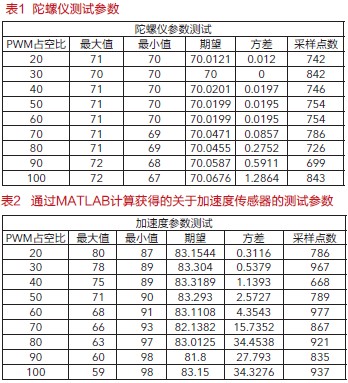
之后我们对加速度传感器进行了测试,如图2。通过以上数据,我们不难获得以下一些结论。
1、陀螺仪的噪声还在可以接受范围,但是加速度计噪声已经远远超出可控范围接受。
2、对于加速度计做一个补充说明,加速度计在车模直立状态下,电机PWM占空比100%噪声情况下,幅值映射到实际角度大约是60度左右。根本不能直接使用。
3、方差(可以等效理解为噪声大小)随着占空比不断增加。
4、加速度计虽然噪声很大,但是长时间来看,他的数学期望是非常稳定的。
5、陀螺仪的噪声比较小,但是他的误差会对积分造成漂移。
无论是加速度计还是陀螺仪,都有自己的优势和劣势。简而言之:加速度计短时间内不可信,但是长时间内可信。陀螺仪短时间内可信而长时间内不可信。这也就是为什么车模直立必须使用两个传感器来完成信号获取。因为单个传感器不可靠,只有取其精华去其糟粕,发挥两个传感器的共同优势,才能够取得好的效果。于是,我们需要一种算法,能够在短时间内置信陀螺仪,而长时间内置信加速度计的算法。这就需要卡尔曼滤波。
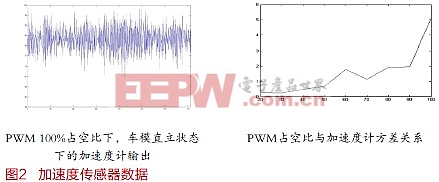
卡尔曼滤波化简
上述五个公式便是卡尔曼滤波的五条数学公式在本项目中的使用。但是,以上五个公式,仅仅只是矩阵形式。虽然可以在MATLAB里进行仿真,但是却不能使用单片机进行有效运算。












评论