将无传感器BLDC电机控制引入低成本应用

摘要:本文分析了采用无传感器BLDC的优势,及低成本应用的具体实现方法。
电机在我们日常生活中的几乎每个部分发挥着作用。它们驱动洗碗机和洗衣机,使室内变得凉爽,并且对于现代交通工具更是必不可少。无刷直流(BLDC)电机已成为许多匀速或变速的高可靠性中高档系统的选择。借助几个霍尔效应传感器和一个控制器,BLDC电机变得相对容易控制。如今,BLDC电机系统已十分常见,但是,大多数系统仍使用传感器来控制电机。为了降低BLDC系统的成本并提高可靠性,许多设计人员希望除去传感器。无传感器系统已出现相当长一段时间,但在过去,它们需要昂贵的控制器才能运行除去传感器所需的算法。数字信号控制器(DSC)(例如 Microchip 的dsPIC33FJ15MC102,批量订购时,单价仅约1美元)使无传感器BLDC电机控制得以大规模应用。
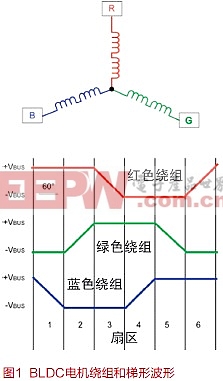
无传感器BLDC控制依靠BLDC电机的特性来计算转子位置,并在此位置使电机在适当的时间换向。为了解释其工作原理,我们回头看一下BLDC电机本身以及基本的传感器控制。从根本上讲,BLDC电机使用励磁线圈(称为定子)在转子(或轴)上产生平行于线圈轴线的磁场,使转子旋转并产生转矩。在三相BLDC电机中,定子中的三个线圈(或相)连续导通和关断使转子旋转并产生转矩。为使转子保持旋转,必须在转子旋转到相应位置前导通和关断相关相。为了使转子平稳旋转,构成电机的每个绕组或相都可由多组线圈组成。每相都必须按特定顺序导通和关断才能使转子旋转。转子的位置决定了哪相需要导通或关断。因此,了解转子位置对于电机的运行至关重要,为了使BLDC电机工作,控制器必须主动导通或关断这些相。控制器必须将定子内的磁场保持在转子之前,以保持转子旋转。获取转子位置的最简单方法是使用霍尔效应传感器,它们可生成脉冲将转子位置通知给控制器。了解转子位置后,基本BLDC控制器只需查找三个相的哪种模式对应于转子位置,并将这些相切换到相应模式。
依靠传感器的运行实现起来非常容易,但除去传感器可降低系统成本并提高可靠性。为了理解无传感器算法如何计算转子位置,我们进一步了解一下BLDC电机的三个相。
在“梯形”控制中,在任何时刻都是一相被拉为高电平(+VBUS),一相被拉为低电平(-VBUS),第三相不活动。由于每相的波形都像梯形(见图1),“梯形”控制因此而得名。当转子经过某相时,转子上的永磁在该相感应出电流,进而产生称为反电动势(EMF)的电压。反电动势取决于每相绕组的匝数、转子的角速度以及转子永磁场的强度。每相的反电动势波形与转子位置相关,因此反电动势可用于确定转子位置。
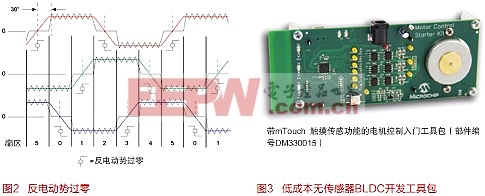
有许多不同方法使用反电动势确定转子位置,其中最常见和最可靠的一种是过零检测。当其中一个反电动势信号转换并过零点时,控制器需要切换相的模式。此过程称为换向(见图2)。为使转子保持向前转动,在发生过零和换向之间的时间内必须进行相移,电机控制器必须计算和补偿该相移。一种实现过零的简单方法是,假设每当任一相的反电动势达到VBUS/2时就会发生过零事件。
利用几个配置为比较器的运放,可轻松实现该方法。但是,该方法中存在几个问题。首先,反电动势通常小于VBUS,因此过零事件不一定发生在VBUS/2。此外,每相的特性可能不同,因此一个相的过零反电动势电压可能与其他相的过零反电动势电压不同。最后,这个过于简单的检测方法会导致检测的反电动势信号出现正负相移。
在实际电机中,过零阈值电压变化很大。幸运的是,这个变化的阈值电压等于电机中性点电压,因为电机中性点是全部三相反电动势的平均值。因此,只要任一相的反电动势等于电机的中性点,就会发生过零事件且控制器需要换向。这可以通过电阻和运放完成,或者使用控制器自身的ADC模块和软件实现。利用可编程控制器(如dsPIC系列DSC),每相的反电动势都可以使用ADC模块采样,并且利用三个反电动势信号的平均值可轻松使用软件重建中性点。随后,软件可将该值与检测到的三相的反电动势进行比较,并检测过零事件何时发生。发生过零事件后,控制器使电机换向,然后整个过程重复执行。因此,通过使用电机的反电动势和检测过零,可从系统中除去传感器,同时保持相同的性能水平。
在实际系统中,无传感器运行方式还会遇到其他困难。首先,在低速运行时,反电动势非常小,很难检测到。因此,在电机开始快速旋转,快到产生足够大的反电动势以在无传感器模式下运行前,控制器必须猜测转子位置。可软件编程的控制器使系统启动方式可根据特定应用进行调整,从而减少此问题的影响。另一个问题是MOSFET的开关噪声。由于MOSFET通过开关操作来更改每相的电压,这会将噪声引入到由控制器ADC模块检测的反电动势中。需要过滤掉这种噪声,以精确重建每相的反电动势。DSC的处理器内建DSP引擎,可轻松处理实现数字滤波和消除开关噪声所需的计算。其他挑战来自特定设计的特性。但是,使用可软件编程的控制器通常会使这些挑战更容易解决,就像本文提及的两个问题的解决方案一样。
通过示例进行研究和实验使得学习新技术更为容易。专为无传感器BLDC控制定制的开发工具大大简化了学习过程并加快了产品开发。过去,利用开发工具学习需要付出昂贵的金钱和时间成本。市场上的新工具正在改变这一局面。例如Microchip的电机控制入门工具包,其成本低于100美元,而且包括详细的应用笔记、示例软件和硬件原理图(见图3)。电机控制器供应商(包括Microchip)通常会在其网站上提供免费的软件和硬件文件,使学习过程更轻松。
总之,随着电子电机市场的持续增长,对BLDC电机系统的需求也将增长,且成本压力将上升,基于DSC的无传感器技术正率先满足这些新需求,解决成本挑战。
参考文献:
[1]Sensorless BLDC Control with Back-EMF Filtering Using a Majority Function. http://www.globalspec.com/reference/8695/sensorless-bldc-control-with-back-emf-filtering-using-a-majority-function

传感器相关文章:传感器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
风速传感器相关文章:风速传感器原理 霍尔传感器相关文章:霍尔传感器原理










评论