56F8013程序Flash的在线可编程特性及应用

摘要: 本文在介绍56F8013的Flash编程方法的基础之上,描述一种它的自举程序(Bootloader)实现方法。该方法应用在智能汽车竞赛直立车模控制系统开发过程中,加快了车模现场调试的过程。该方法原理同样适应于飞思卡尔公司数字信号控制器系列其它单片机开发。
本文引用地址:https://www.eepw.com.cn/article/135966.htm智能汽车竞赛要求必须采用飞思卡尔公司的微控制器作为控制单元的核心芯片,数字信号控制器(DSC)系列具有运算速度快、功耗低、外围设备丰富等特点,非常适合智能汽车竞赛车模控制。在竞赛秘书处提供的直立车模控制参考方案中就采用了DSC56F8013芯片组成控制核心电路[1]。该芯片不仅内部硬件资源可以满足车模控制要求,而且它的软件开发环境Codewarrior中的PE(Processor Expert)可以自动生成芯片中各硬件模块的接口代码,使得开发者只需关注应用软件的开发,这样便可以提高软件的开发效率和准确性。
在DSC56F8013的程序开发和调试中,可以使用专用的JTEG调试工具,这种方式在车模控制系统开发中具有一定缺点。车模现场调试中,单片机的代码和参数需要频繁的进行更新,使用JTEG调试工具,调试接头的引线很多,插拔接头不便。特别是无法在车模运行时实时监测内部程序控制参数。
自举程序(Bootloader)设计
实现IAP过程中,一般将更新程序功能的代码设计成独立的自举程序(Bootloader)模块。将它烧写在单片机内部特定的位置。
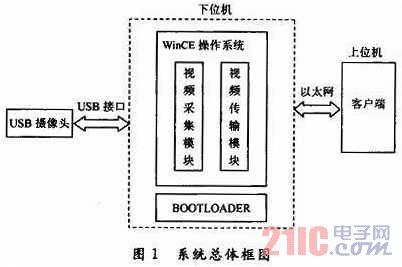
通过自举程序下载单片机程序的系统硬件连接如图1所示。

56F8013电路板通过串口电平转换器与上位计算机相连。这个串口既可以下载单片机应用程序,同时也可以对单片机程序运行进行监控。实现Bootloader功能包括单片机程序和上位计算机的下载程序两部分,下面分别进行介绍。
Bootloader程序的功能描述和开发
根据上述代码空间划定,单片机在复位之后,首先执行Bootloader程序,在Bootloader程序中,先检查在一定时间内(一般设置为100ms左右)是否接受到用户通过串口发送的0x55数据。如果受到了0x55数据,并在最后由0xaa数据结束,便进入Bootloader命令状态,接受相应的程序下载指令,进行程序的更新。否则便从0x1AFF读取用户程序的起始地址,开始执行用户程序。具体的启动过程如图3所示。
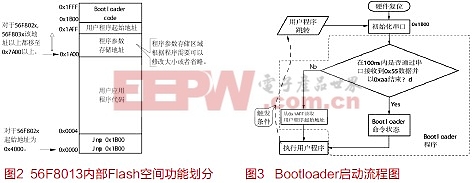
也可以通过设定一定的触发条件从用户程序直接跳转至Bootloader程序。在Bootloader命令状态下,可以接收上位计算机发送一组处理命令,如表1所示。上位机程序通过上述三个基本命令便可以完成对56F8013内部Flash的编程。

开发Bootloader程序可以在CodeWarrior提供创建新工程文件serial_bootloader模板基础上进行改写完成。模板serial_bootloader提供了Bootloader程序所必需的串口通讯、Flash读写子程序[3]。特别是Flash访问程序比起PE生成的子程序更加简捷。虽然在serial_bootloader模板中已经可以直接接收通过超级终端发送的S-记录格式的单片机程序完成程序的下载功能,但效率低,而且用户程序开发不方便。通过重新改写之后,可以直接下载程序的二进制代码,可以提高下载速度,方便用户程序开发。









评论