在飞思卡尔DSC中实现矢量控制算法

摘要:本文重点介绍永磁电机的无传感器器矢量控制及其在飞思卡尔DSC上的实现。
本文引用地址:https://www.eepw.com.cn/article/133768.htm在目前的电器中,高级电机控制算法通常基于矢量控制技术,如图1所示。使用矢量控制算法,交流感应电机和PM同步电机的控制流程类似于单独使用的直流电机的控制。在特殊的参考坐标系中,定子电流可以分为由转矩生成的电流和由磁场生成的电流。这些电流通过直流值表示,可以单独进行控制。
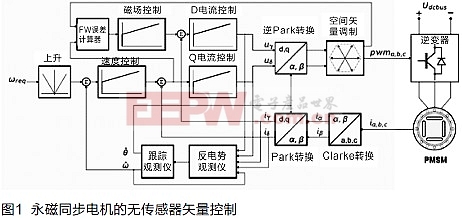
矢量控制算法要求使用高速ADC测量三相电流。电流测量必须与PWM脉冲中心同步,以避免转换噪声,并得到一个有意义的平均电流值。通常情况下,两相电流将同时进行测量,第三相电流通过计算得出。因此,DSC能够一次对两个电流进行采样,与PWM保持同步。三相电流被转换为循环的d/q坐标,其中可以单独控制在目前的电器中,高级电机控制算法通常基于矢量控制技术,如图1所示。使用矢量控制算法,交流感应电机和PM同步电机的控制流程类似于单独使用的直流电机的控制。在特殊的参考坐标系中,定子电流可以分为由转矩生成的电流和由磁场生成的电流。这些电流通过直流值表示,可以单独进行控制。
矢量控制算法要求使用高速ADC测量三相电流。电流测量必须与PWM脉冲中心同步,以避免转换噪声,并得到一个有意义的平均电流值。通常情况下,两相电流将同时进行测量,第三相电流通过计算得出。因此,DSC能够一次对两个电流进行采样,与PWM保持同步。三相电流被转换为循环的d/q坐标,其中可以单独控制转矩生成的电流和磁通生成的电流。控制系统包括两个电流控制环路-一个用于转矩(由q控制器表示),另一个用于磁场-磁通(由d控制器表示)。根据这些控制器的结果,使用空间矢量调制技术计算出输出电压矢量,并生成对应的逆变器补充PWM信号。如果电机速度超出了额定值,则必须包括一种特殊算法,能够支持在磁场削弱区域运行。即便如此,一些电机仍然具有强大的磁阻转矩。为了使用这个磁阻转矩并构建尽可能小(且便宜)的电机,开发人员实施一种称为最大转矩电流比控制(MTPA)的特殊算法,该算法可充分利用磁阻转矩。MPTA还提高了效率。单独和独立控制由转矩和磁通生成的电流将实现高度动态的运行(可实现非常低的速度)和良好的控制。
要实现适当的功能,矢量控制算法需要提供位置和速度信息。在工业驱动器中,该信息通常从机械位置/速度传感器获得,例如编码器、解析器、SinCos甚至位置霍尔传感器。对于目前的大多数电器驱动器来说,机械传感器过于昂贵。在某些情况下,由于泵或压缩机内的机械限制,甚至很难使用传感器。因此,电机位置和速度必须通过先进的无传感器算法计算得出。对于永磁同步电机的无传感器位置计算,最有用的算法是基于电机的反电势(Back-EMF)数学模型的计算。反电势数学模型需要相应的电机参数、外加电压和电机电流。在运行时,DSC将解析方程组,运行数字滤波器和估算器,并计算正确运行矢量控制算法所需的位置和速度。由于该模型基于电机反电势电压,而这种电压在速度为零时会消失,显然,该方法在速度为零或低速情况下无法提供位置和速度信息。因此,该方法需要一个专门的启动算法-在通常情况下,是带有某种转矩和电流限制的开环启动。
所有这些算法的计算都需要处理器提供较高的计算能力。要求最苛刻的是矢量控制算法的快速控制环路,其中包括相位电流重建、电流转换成旋转坐标计算、电流控制器、空间矢量调制以及带有位置和速度估算器和过滤器的全反电势观测仪。快速控制环路的计算必须与PWM频率同步,通常在每个PWM脉冲上运行-对于8-16kHz PWM是63-125微秒的周期。
双电机控制需要并行计算两个矢量控制算法。通常情况下,这两个电机共享一个逆变器直流总线电路。为了减少直流总线电容的电流应力,并实现最小的直流总线电压纹波,这两个电机的PWM脉冲每经过半个PWM周期就互相进行转换。这种PWM转换允许实现交替的ADC采样,因此两个ADC转换器便足够了。然后,每个电机的无传感器矢量控制算法的快速环路计算也可以交替进行。


pwm相关文章:pwm是什么
霍尔传感器相关文章:霍尔传感器工作原理
电流变送器相关文章:电流变送器原理 霍尔传感器相关文章:霍尔传感器原理 矢量控制相关文章:矢量控制原理









评论