完全自主型仿人机器人成为首个参加RoboCup的仿人机器人

用NI LabVIEW开发的机器人DARWin,是美国第一个进入“机器人世界杯足球赛“的。
作者:
Karl Muecke - Virginia Tech University
行业:
大学/教育, 科研, 机电学/ 电工学
产品:
挑战:
开发作为新步态研究平台的机器人系统,设计美国第一个参加RoboCup(自主型机器人足球比赛)的仿人机器人。
解决方案:
该方案采用NI LabVIEW与第三方硬件交互,加速新步态研究的开发与测试;同时采用LabVIEW实时模块和NI视觉软件创建人工智能,从而使机器人可以执行高级功能,如踢足球。
"利用LabVIEW的游戏手柄VI可轻松实现这一设想。我们可轻松地调试步态和运动,无需同时调试机器人动作。"
为 研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器人足球比赛作为展示这一款机器人优越性和可行性的舞台,同时展示DARwIn的鲁棒 性。
当前机器人编程和控制技术通常采用C代码,其学习曲线比较陡峭,并且硬件更新难度也相对较大。在RoMeLa,我们采用NI技术加速新机器人步态研发,最终使完全自主型仿人机器人问世。该机器人不仅可踢足球,也可作为新步态的研究平台。我们采用LabVIEW图形化开发平台不仅为了创建可扩展、适应性强的软件,同时也可开发执行高级任务的机器人大脑,如踢足球比赛。
LabVIEW作为可扩展硬件接口
由于RoMeLa中的机器人平台多种多样,我们需要选择一款通过简单配置即可适应不同硬件设置的系统。大多数小型机器人研究使用个人数字助理(PDA)自主控制机器人。在PC104+计算机上采用 LabVIEW 实时模块后,几 乎无需任何开销即可实现计算机架构扩展。与PDA不同,该系统可兼容一系列不同传感器——IEEE 1384相机、RS485通信、多个无线网络和其他众多设备。添加新相机或802.11端口、适配型驱动器,写入C或C++代码花费均需耗费大量时间,而 LabVIEW VI使得所有问题迎刃而解。
目前,我们采用LabVIEW通过RS485控制机器人动作,并从同一串行网络的伺服电机内置电位计上读取关节位置。在机器人行走或移动的同时,带加速度和方向信息速率的陀螺仪通过RS232串口与LabVIEW通信,此时程序即可实时修改行走步态进而高效地控制机器人平衡。
最初的机器人研发平台,仅需伺服电机和速率陀螺仪接口。然而,参加2007年7月RoboCup的竞赛机器人所需的硬件 和编程无疑更为复杂。除须机器人行走和维持平衡外,软件还须提供视觉、大脑和通讯功能。由于在RoboCup比赛中,机器人必须完全自主和无线控制,因而 只能采用网络主机控制机器人的起/停信号。LabVIEW实时运行所有机器人软件,成本和CPU时间都得以降低。
验证步态研究
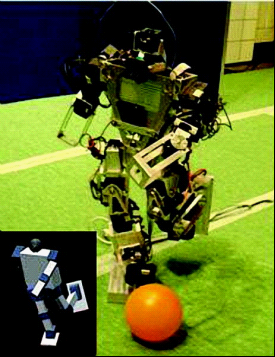
生成机器人步态数学公式时,很难可视化看到结果。采用LabVIEW不仅可调用其它计算软件包生成的步态(如 Wolfram Mathematica或Microsoft Excel),而且可通过建立机器人的可视化运动图形帮助研究步态。利用LabVIEW的3D图形控制,我们可以仿真机器人执行所生成步态时的行为。由于 无需利用物理硬件设置和测试步态,节省了大量的研发时间。
在物理硬件上进行机器人步态测试时,我们可以通过用户控制的游戏手柄模仿机器人的人工智能。用户作为机器人的眼睛和大 脑,而手柄作为控制机器人动作的接口,通过发送命令控制机器人行走、踢、扑救等动作。利用LabVIEW游戏手柄VI,这种设想可轻松实现。我们可轻松地 调试步态和运动,无需同步调试机器人动作。
创建人工智能
在未进行任何预先视觉处理的情况下,短短两小时内,一位研究生即可配置两台IEEE 1394相机并写一段VI程序(用于RoboCup所用桔黄色足球的相对位置识别和物理定位)。完成这一任务,全球任何其他院校可能需要众多学生花费很长 时间研究代码。但是以我们的开发效率,一位学生在短短一周内即可实现DARwIn足球动作控制,该机器人是首台而且是美国仅有的一台参加RoboCup比 赛的仿人机器人。

c++相关文章:c++教程
伺服电机相关文章:伺服电机工作原理










评论