SimData深度解析:高保真虚拟数据集的构建与评测

在自动驾驶感知的下半场,数据已成为驱动算法迭代的核心燃料。然而,真实路测数据面临着成本高昂、标注困难、极端场景(Corner Cases)难以覆盖以及安全性受限等“卡脖子”问题。
面对这一核心痛点,虚拟仿真数据已成为解决方案中的关键角色,成为确保开发效率与安全性的不可或缺一环。免费获取 | SimData高保真虚拟数据集开源发布,兼容nuScenes,开箱即用!文章中,简单介绍了一下SimData数据集情况,本文将深度解析该SimData自动驾驶虚拟数据集——由aiSim仿真平台构建,从数据生产工具链、数据集结构到基于BEVFormer的深度评测,全方位展示高保真合成数据的应用价值。
一、 从仿真到标准格式的工具链虚拟数据要真正落地,首要解决的是与现有主流数据格式的兼容性。SimData方案不仅提供数据,更提供了一套完整的aisim2buscenes自动化转换工具链,并且构建了虚拟数据集的评测流程框架。
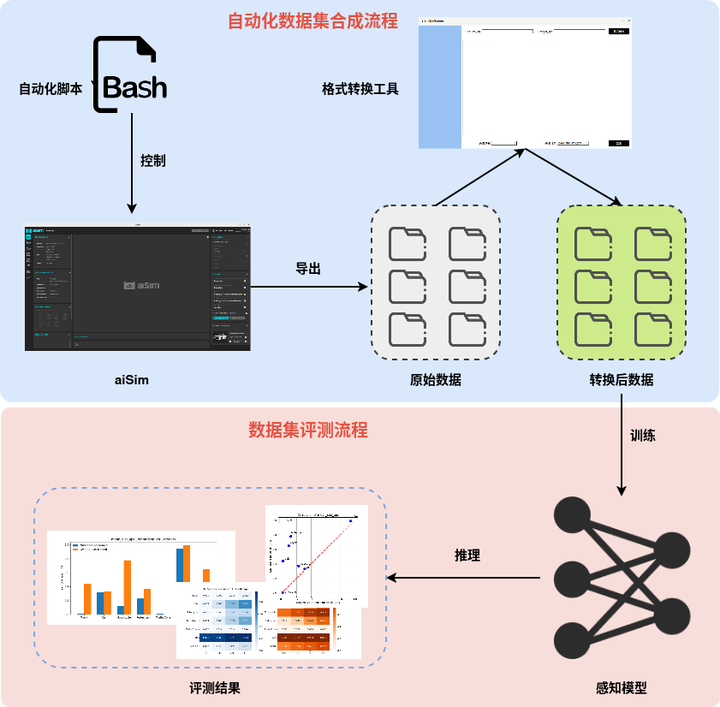
虚拟数据集构建以及评测流程框架
1、无缝兼容 nuScenes我们开发了自动化脚本与GUI工具,实现了从aiSim导出数据到nuScenes标准格式的一键转换。
格式对齐:自动将aiSim原始数据(TGA图像、LAS点云、Radar JSON)转换为nuScenes兼容格式(JPG、BIN、PCD)。
结构一致:生成的文件夹结构(maps, samples, sweeps, v1.0-custom)可直接被官方nuscenes-devkit解析,无需修改现有训练代码。
智能切片:脚本支持多场景、多地图转换,默认每场景40关键帧(每10帧抽取1关键帧),自动处理非关键帧归档。
工具链支持复杂传感器配置的数据生成与验证:
传感器配置:目前支持6路相机、5个Radar、1个LiDAR的多源融合感知。
可视化验证:内置脚本支持LiDAR点云、Radar PCD文件以及带3D GT框的图像/BEV视角可视化,确保数据“所见即所得”。
基于上述工具链,我们构建了SimData数据集,旨在覆盖高速、城区、停车场等典型及复杂道路环境。
规模统计:包含15个独立地图,共计45个场景。
数据体量:单个传感器输出约18,000张图像/帧数据,总样本量充足。
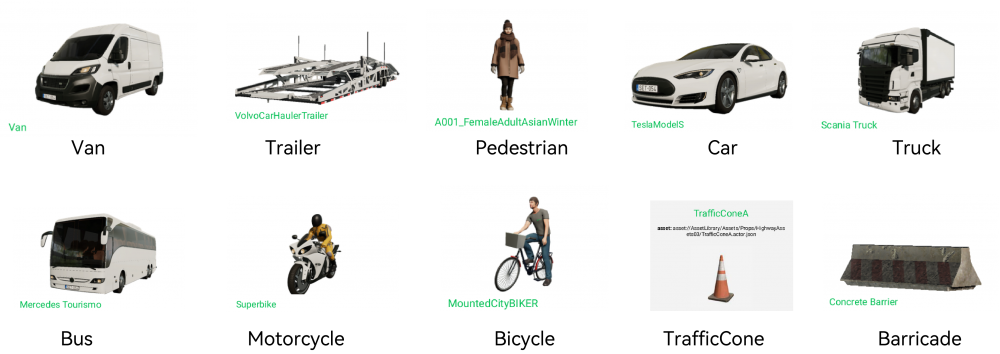
类别扩展:在nuScenes原有的Car, Pedestrian, Truck, Bus等常见类别基础上,新增了Van(面包车)类别,共计10类目标,弥补了部分长尾数据的缺失。
10个类别:
{ "Van", "Trailer","Pedestrian", "Car", "Truck", "Bus", "Motorcycle", "Bicycle","TrafficCone","Barricade" }
虚拟数据形象部分示例:
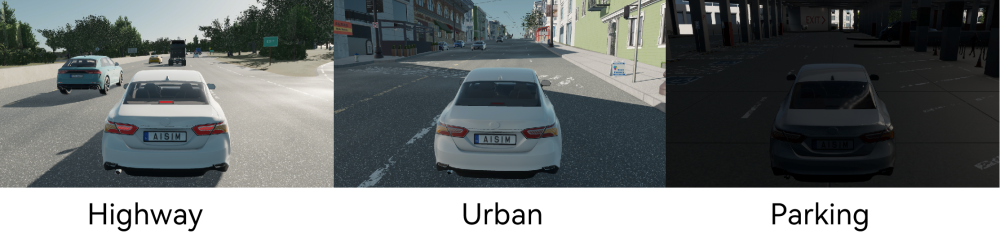
环境多样性:
Highway:高速公路匝道、施工区。
Urban:拥堵城区、环岛、十字路口。
Parking:室内外停车场环境。
地图示例:
为了验证SimData在感知算法中的有效性,我们选用BEV感知领域的经典模型 BEVFormer (Tiny版),进行了多维度的对比实验与分析。
1、基础性能:虚拟数据具备可用性在SimData划分的训练集(30个场景)上训练,并在测试集(15个场景)上评估,模型展现了良好的收敛性。

结果:mAP达到 0.446,NDS达到 0.428。
结论:SimData能够支持复杂感知模型的正常训练与推理,数据质量合格。
我们对比了“基于SimData训练的模型”与“基于真实nuScenes训练的官方模型”在同一份虚拟数据上的表现,以探究域分布差异。
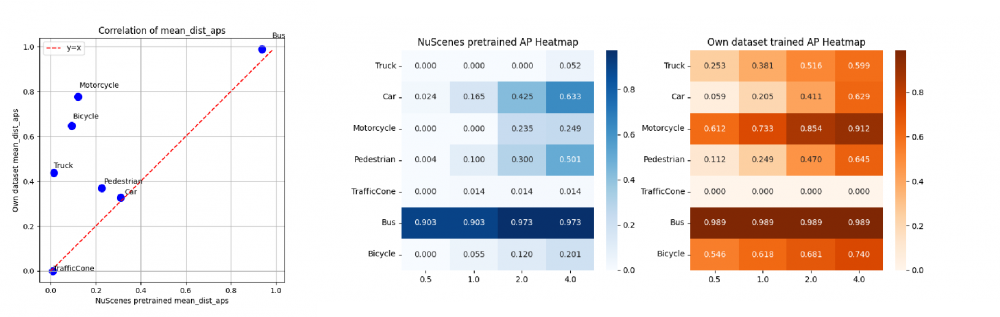
相关性分析:两者在各类别的AP(平均精度)分布上呈现高度正相关。
热力图对比:在不同距离范围的检测热力图上,两者表现出非常相似的分布趋势。
结论:SimData的高保真度体现在几何结构、光照、材质及动态特性上,真实世界学到的先验知识可以有效迁移到该仿真域中。
这是本次评测最核心的发现。我们尝试将nuScenes预训练模型在SimData上进行微调(Fine-tuning)。
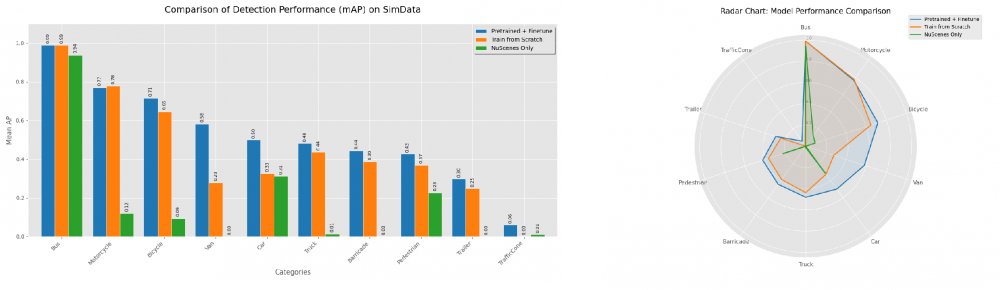
实验结果:微调后的模型在SimData上的检测精度显著提升,性能甚至超过了从零开始训练(Train from Scratch)的模型。
雷达图分析:在Car, Truck, Bus等主要类别上,"Pretrained + Finetune"(蓝线)包围面积最大,表现最优。
这一结果有力证明了:
SimData的域特性与真实数据足够接近,不存在巨大的域鸿沟。
利用大规模真实数据预训练 + 针对性虚拟数据微调,是提升模型在特定场景(如极端工况)泛化能力的有效路径。
SimData及配套工具链的推出,为自动驾驶数据闭环提供了一种低成本、高效率的解题思路。
易用性:aisim2nuscenes工具链让仿真数据即插即用,无缝融入现有开发流。
真实性:评测数据表明,SimData与真实数据分布趋势一致,具备极高的物理感知价值。
价值点:它不仅能作为感知模型的训练补充,更是验证模型泛化能力、解决长尾问题的理想“演兵场”。
未来,随着数据集规模的进一步扩大(解决部分类别样本稀缺问题),SimData有望在更复杂的感知任务中发挥关键作用,助力自动驾驶算法加速迭代。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
相关推荐
INA111构成的多路输入数据采集系统
高速数据采集平台解说4
数字孪生:云的极限
基于AD芯片AD1674设计的数据采集电路
ISO122的低成本三端口、四通道隔离式数据采集系统电路
数据采集技术第一讲:DAQ基础知识简介
如何将第三方模型导入LTspice
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(下)
初创公司Quantum Elements将人工智能和数字孪生带入量子计算领域
Quantum Elements将人工智能与数字孪生引入量子计算领域
数据采集系统基本接地和耦合电路(采样保持放大器AD783)
modelsim使用手册
晶圆厂与封装厂自动化迎来设备和方法论变革
数字孪生:云阔凭鱼跃,天高任鸟飞
面向科学仿真的开放模型系列NVIDIA Apollo正式发布
Ansoft机电系统设计仿真工具
达索系统与英伟达围绕虚拟孪生构建工业人工智能平台
视景建模与仿真工具MultiGenCreator/Vega
数据采集技术第二讲:配置管理软件MAX
点“钢”成金:人工智能与数字孪生如何推动工业机械未来
modelsim最详细最权威的入门教程
由ISO100构成的数据采集系统的多通道隔离可编程增益放大器
使用LabVIEW构建简易数据采集系统
加速电路设计的软件
INA110快速扫描数据采集通道电路
硬件工程师必读攻略-如何通过仿真有效提高数模混合设计性(上)
常见 FPGA/PLD及VHDL/Verilog 开发软件
大尺度抽象化竞赛启幕,数据中心迎来全新变革
仪表仿真工具Glstudio
减少精密转换设计周期中的挑战