如何计算CAN通信波特率

在CAN总线系统中,波特率的计算是一个关键步骤,它确保网络上的所有设备能够以相同的速率进行通信。
1
理论
波特率的计算涉及到几个关键参数,包括CAN控制器的时钟频率、分频因子、以及位时间的不同部分。
时钟频率(Fclk)
CAN控制器的时钟频率。
这是CAN模块的输入时钟,通常来自于微控制器的主时钟。
分频因子(Prescaler)
用于从主时钟频率中分频得到位时间计数器的时钟频率。
分频因子可以增大位时间,使得CAN总线能够在较低的波特率下工作。
位时间(Bit Time)
位时间由几个部分组成,总共需要满足规定的时间量子(Time Quanta,TQ)数:
同步段(Sync Seg):
用于同步不同节点上的数据边缘,固定为1 TQ。
传播时间段(Prop Seg):
用于补偿网络中的物理延迟,长度可以调整。
相位缓冲段1(Phase Seg1)和相位缓冲段2(Phase Seg2):
用于对抗信号抖动和网络延迟,长度可调。
基于上述参数,CAN波特率的计算公式如下:
波特率 = Fclk / (Prescaler * Bit Time)
其中,Bit Time = Sync Seg + Prop Seg + Phase Seg1 + Phase Seg2。
假设一个CAN控制器有如下参数:
Fclk = 16 MHz
Prescaler = 8
Sync Seg = 1 TQ
Prop Seg = 2 TQ
Phase Seg1 = 3 TQ
Phase Seg2 = 2 TQ
Bit Time = 1 + 2 + 3 + 2 = 8 TQ
则波特率为:
波特率 = 16 MHz / (8 * 8 TQ) = 16,000,000 / 64 = 250,000 bps (或250 kbps)
2
实践
以AT32F413这款MCU为例,CAN波特率计算公式如下所示:
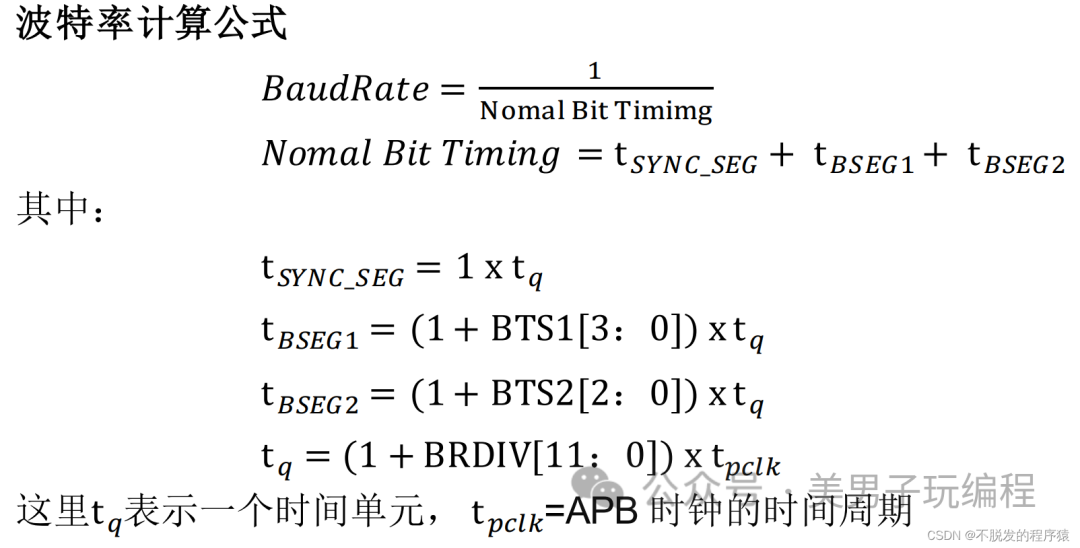
CAN 总线的额定位时间由 3 部分组成:
1、同步段(SYNC_SEG),该段占用 1 时间单元,即公式中的1 x t
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
相关推荐
ZLGCAN,ARM,CAN 请教ZLGCAN有关ARM-CAN问题
基础知识之CAN总线
南芯科技推出车规级高速CAN/CAN FD协议收发器
如何配置控制器局域网络(CAN)位时序实现系统性能优化?
BCM系统解决方案
一文读懂|CAN总线为何要加终端电阻
MC34901: 面向工业应用的高速CAN收发器
CAN 教程
PHILIPS_CAN_控制器SJA1000的BasicCAN控制模块
CAN简介与Atmel Start上CAN驱动开发培训教程
CAN资料
FullCAN函数库V1.0
ARM7MCU提供以太网、CAN、USB、加密技术
驱动汽车电子创新:RIGOL CAN-FD总线分析解决方案
ARM,CAN 请问:我在你们那买的ARM-CAN接口板上用的是什么型号光耦?
dsPIC33EV 5V CAN-LIN入门工具包
车载以太网 10BASE-T1S 迎来升级,太比特级传输速率已提上日程
集成以太网、CAN、USB、加密技术功能的闪存微控制器
低速串行总线调试-CAN译码
CAN-RS232通信转换模块的设计与实现
ISO 16845标准详解
高工作电压5.7 kV rms隔离式CAN FD收发器
使用 3.3V CAN 收发器在工业系统中实现可靠的数据传输
Microchip推出集成式紧凑型CAN FD系统基础芯片解决方案,专为空间受限应用而设计
创新的现场总线CAN-bus实验室
ARM,CAN ARM-CAN接口板
CAN入门书
集成隔离式 CAN 收发器 - ISO1050
FlexRay线控制动参考设计
国内首颗:纳芯微CAN FD收发器NCA1044-Q1通过丰田VeLIO认证