指南|欧姆龙PLC与研控E总线驱动器连接后注意事项

上一期《指南》,我们分享了《七步搞定研控E总线驱动器与欧姆龙PLC主站连接》,这次,我们继续完善接线后的注意事项,希望对你有所帮助!
一、环境对象
1、本手册中所涉及主站组成——欧姆龙PLC[NX1P2系列、NX102系列、NJ301系列、NJ501系列、NX701系列,EtherCAT通信耦合单元NX-ECC2系列等],其所用编程软件:SysmacStudio(编程+配置)。
【注意:本手册相关部分只讲配置注意事项,不介绍编程,如需了解编程的内容请他处查阅相关资料。】
2、本手册中所涉及从站组成——我司 EtherCAT总线驱动器(本文以MS-S3E驱动器为例),其所用参数设置上位软件:YAKO EtherCAT ****。
二、说明注意
本手册主要阐述和记录一些主从站搭配时的注意事项和必要设置。文中所用控制器、驱动器等器件参数数字大小,仅作参考和推荐的优选值,不可作为其他用途而生硬套搬。
软件的说明和链接下载、控制器和驱动器等器件的手册和资料请另寻收集。本手册不做其他连接设置的相关解释说明。
三、连接后使用注意事项(本次重点内容)
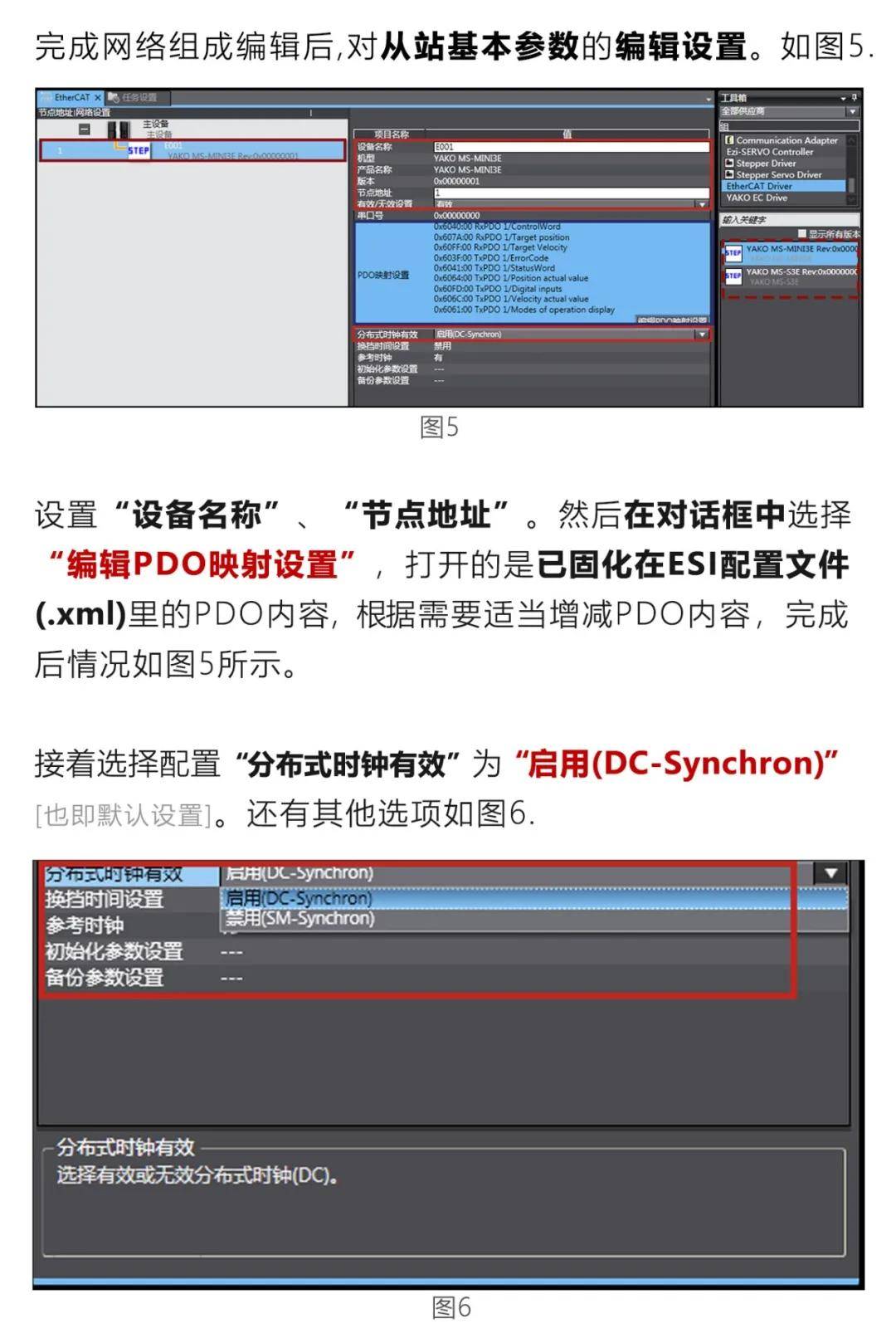
当驱动器与控制器之间建立并完成通信网络的硬件连接和软件组态后,我们需要对相关的通信参数和运动参数进行设置。
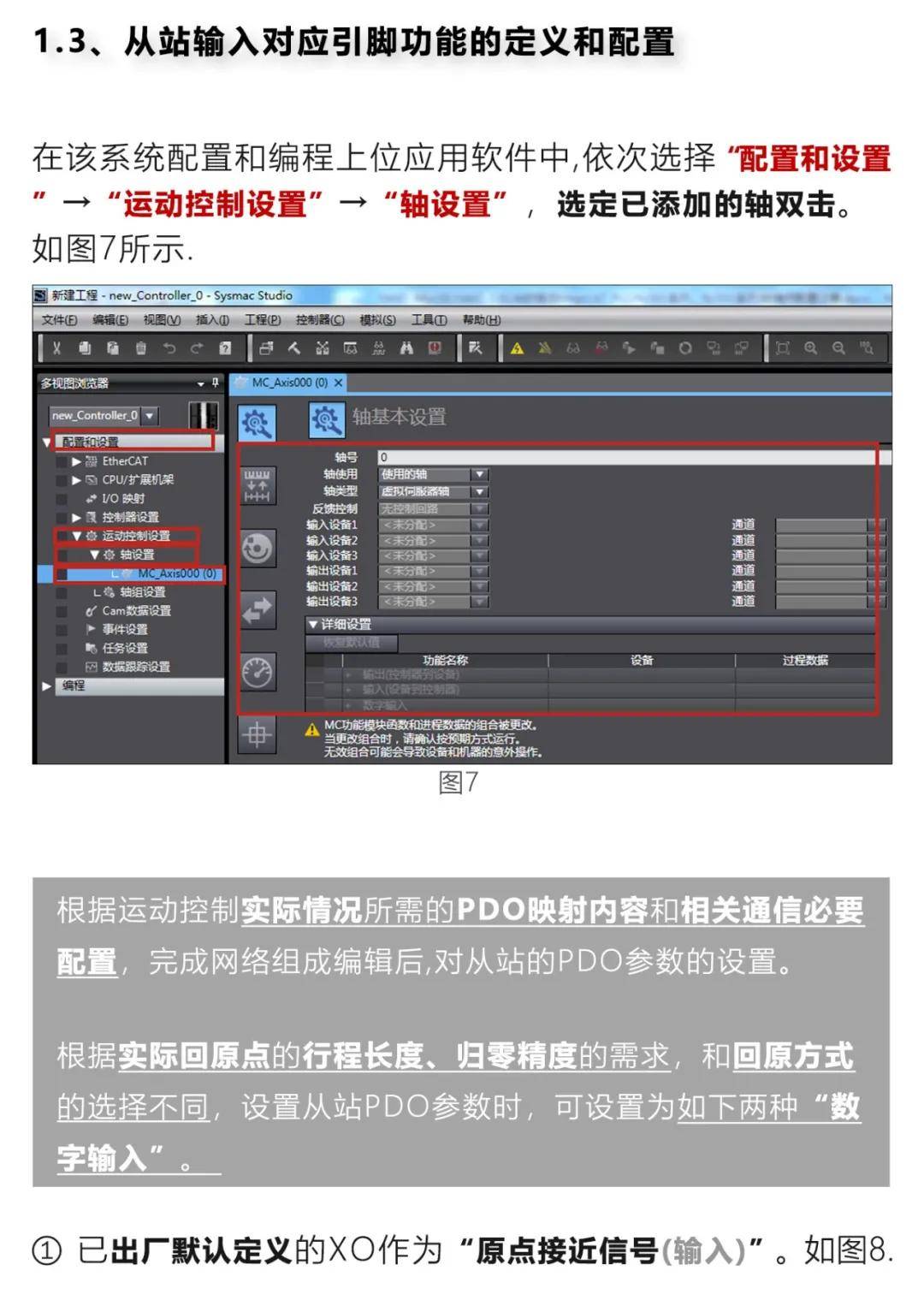
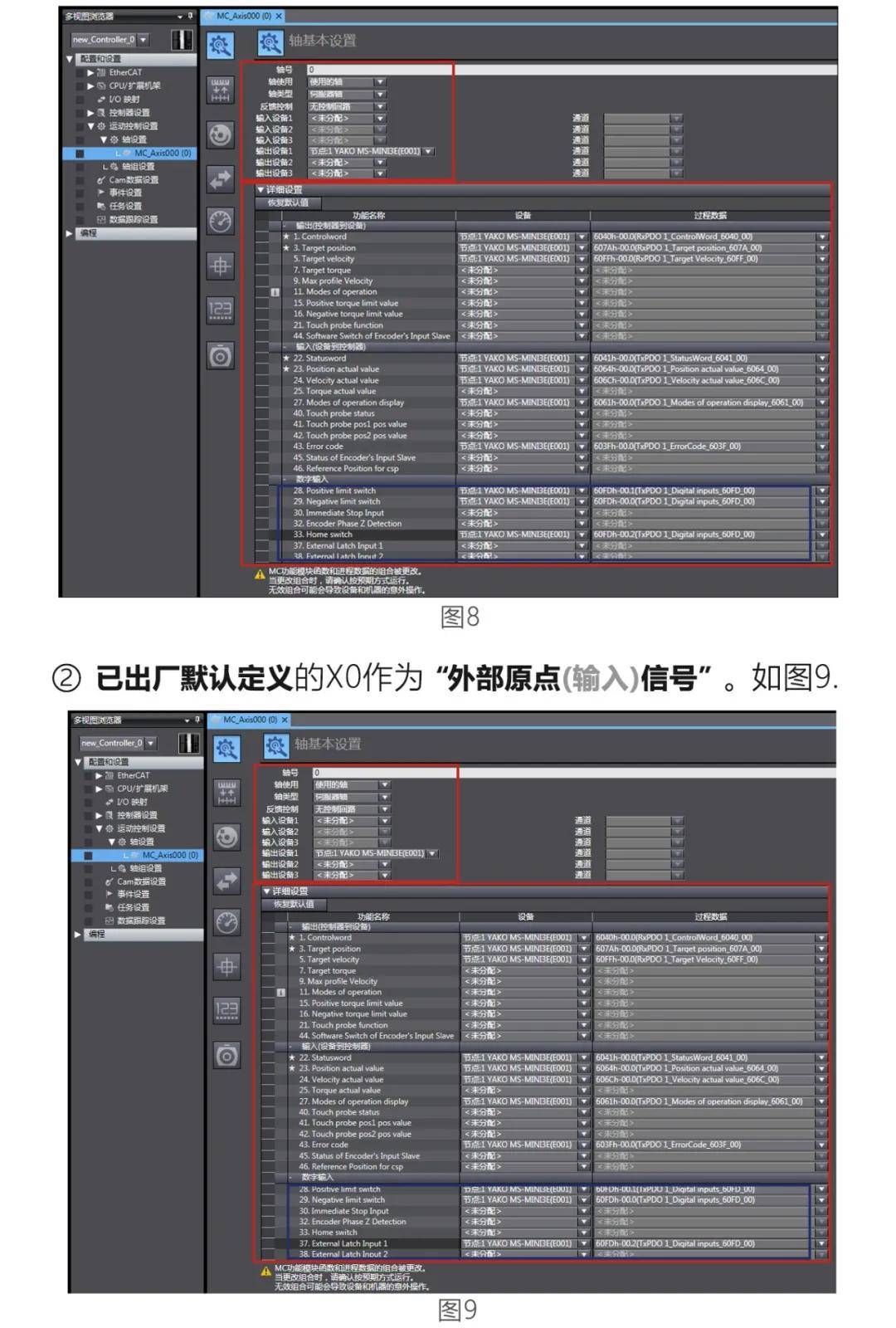
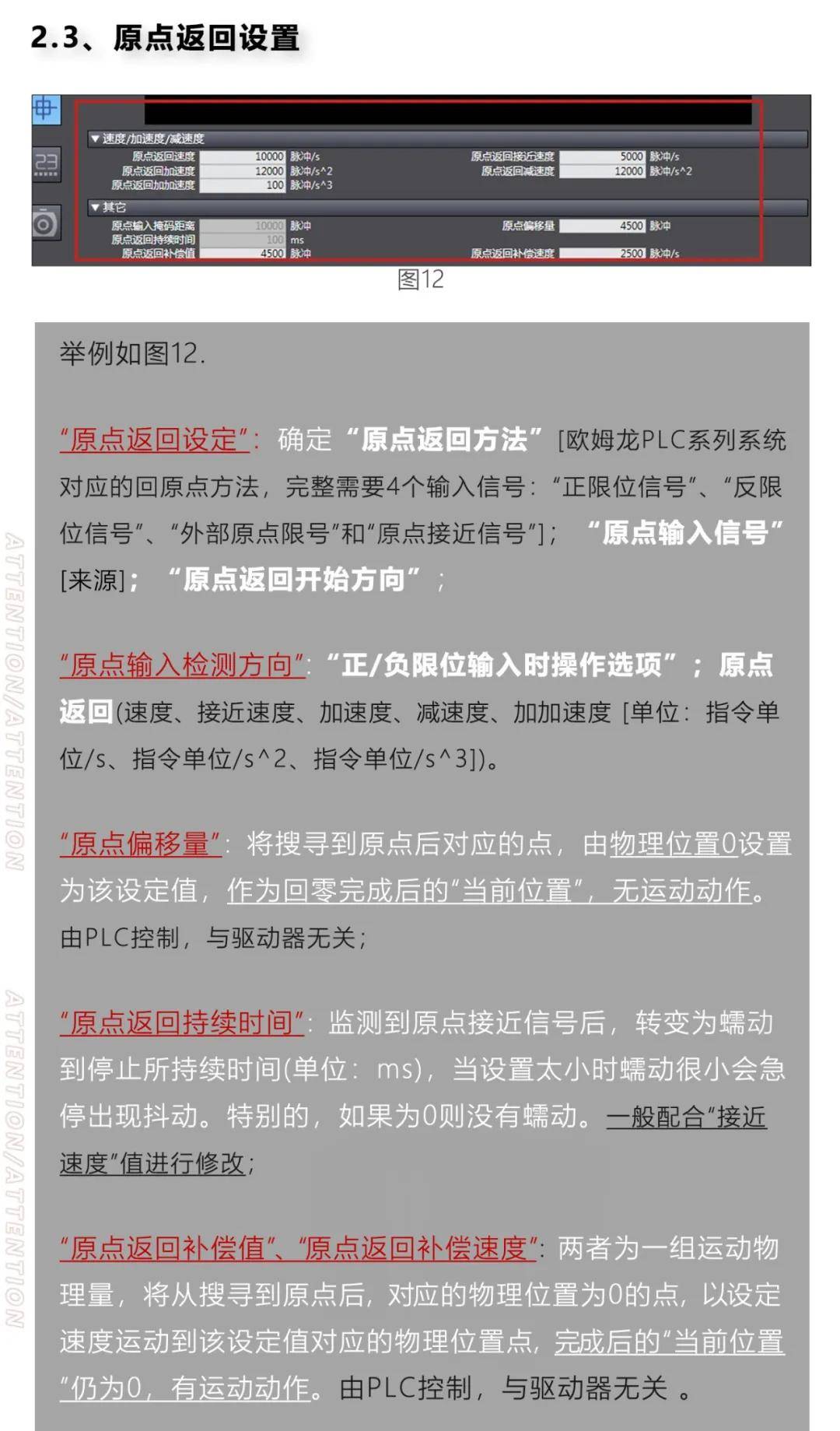
综合前面介绍的PDO设置在“数字输入”部分的分配对应不同方案,考虑到执行机构关于参考点的位置和传感器安装的位置关系,结合回原效率(回原速度—时长)、回原准度、回原平稳性等对“回原方式”、“回原起始方向”和“原点输入检查方向”等进行选择。
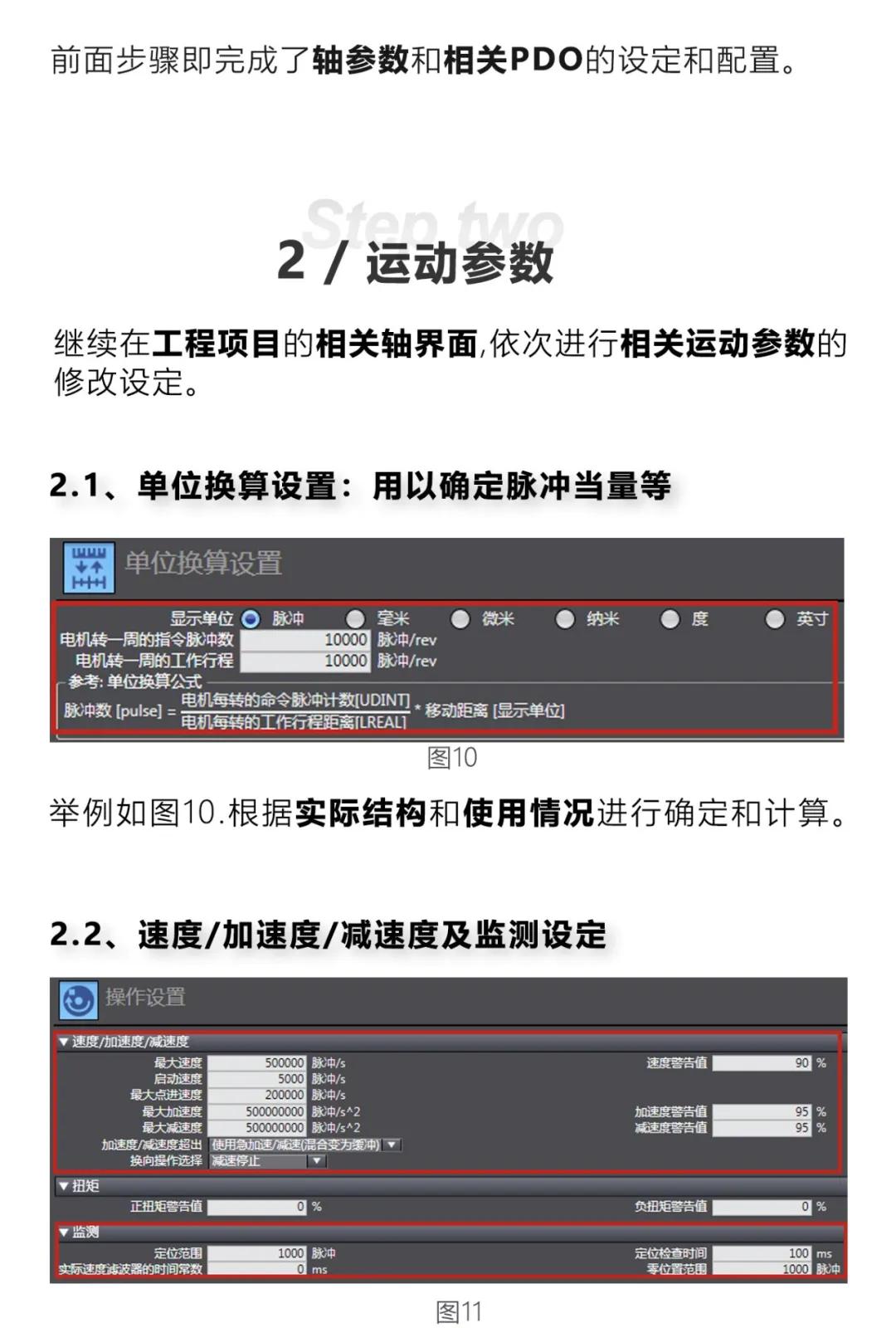
另外,需要注意在定位的运动模式下的基本参数,和其他运动涉及的速度、加/减速度、加加速度、位置、距离等运动相关的物理量的比例倍数关联性设置,以确保运动的速度和位移,有客观正确的现象和结果。
专栏文章内容及配图由作者撰写发布,仅供工程师学习之用,如有侵权或者其他违规问题,请联系本站处理。 联系我们
相关推荐
意法半导体推出面向电机控制的全新氮化镓(GaN)IC平台,助力家电能效升级
uC_OS在ARM上的移植
数字方式的线性调节器
TMS320C54xDSPCPU和外设
欧盟提出“EuroStack”概念:以摆脱对美国数字技术的深度依赖
Microsoft通过“Braga” Maia 200 AI 计算引擎挑战其他云端
TMS9903 同步通讯控制器
大家讨论一下做一个DSP设计的流程吧
中南民族大学:基于虚拟环绕声的音频处理器设计
555简易漏电保安器电路
DSP芯片开发和产品应用(转载)1
江南大学:基于VLC的无线导览系统
对于人工智能处理器初创企业来说,是否是成败的关键时刻?
240亿美元!美光扩建新加坡NAND晶圆厂
浙江大学:基于FPGA的发动机信号接口系统
涨价潮席卷被动元件行业
大嘴业话:企业转型模式的探讨
关于vc33使用后的一些自己的理解
ADC知多少?
555预警式漏电自动保安器电路
DSP芯片开发和产品应用(转载)2
555电机综合保护报警装置电路
555高压验电器电路
ASML计划裁员4%,简化技术部门内的决策流程
TMS320C203_tms320C209 tms320vc203 DSP芯片
哈佛结构
TMS9902 异步通讯控制器
北京工业大学:基于FPGA的情绪检测程序与相关智能宠物的开发
英飞凌与达美携手实现数据中心垂直供电
555断线光电隔离式保护电路