自从美国 iRobot 在 2002 年推出全球第一款扫地机器人之后,扫地机器人开始风靡全球。由于家庭清洁是智能扫地机器人独自完成的,对于智能扫地机器人的生产厂家来说,除了产品的智能化,产品的可靠质量对于消费者而言
关键字:
机器人 保护 方案
对于Android新版本的果冻豆系统期待已久的你,会想到什么方法缓解等待的苦闷和忧虑呢?如果你没有什么好方法,不妨让果冻制作者Bompas Parr给你带来些惊喜吧。 这款“果冻”机器人为全手工打造,通体透
关键字:
电动 果冻 机器人 :Android 订单 超级
在完成上一个以简单电学电路为基础的避障机器人项目后,我们将进行第三个PVC机器人项目制作。这是一个比较特殊的机器人,首先其控制电路比上一个项目稍微复杂了一点,是以电子元器件组成的;其次这个机器人不再以传统
关键字:
可爱 蚊子 DIY- 机器人 动力 昆虫 太阳能
想挣脱地心引力的束缚?想练习跑酷在垂直的墙壁上疾走?——不要用崇拜的目光注视我,虽然我就是飞檐走壁,仁者无敌的可爱玲珑Wallbots!当然我也不介意你称呼我的艺名:【蜘蛛侠】墙面上爬来爬去的是神马?!
关键字:
简单 机器人 可以 一个 元器件 DIY 电子
以下是建造这个机器人所耗费物品的清单: 花费:120美元 时间:20小时 制动器/输出设备:声音放大器、6个齿轮电动机,两个扬声器 控制方法:自主控制 CPU:Picaxe 28 操作系统:Picaxe basic 电
关键字:
演奏 机器人 导航 无线 GPS 国外
摘 要: 介绍了一种基于SPCE061A 的智能音控小车机器人的设计过程, 给出了智能小车的硬件构成。从软件设计的角度阐述了小车使用语音辨识和中断技术的智能控制算法, 并详细说明了语音辨识技术在智能小车上的实现过程
关键字:
机器人 设计 小车 智能 SPCE061A 基于
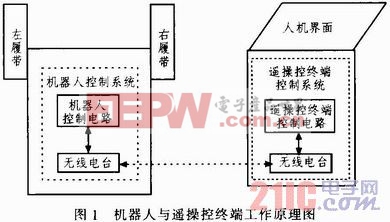
摘要:单兵作战用机器人方便携带、操控简单、可代替人类到达危险环境作战。机器人通过无线电台接收遥操控终端发送的控制指令,按照指令行动;同时机器人采集自身的状态信息,发回遥操控终端。手持遥操控终端的士兵能
关键字:
设计 控制系统 机器人 单兵作战
灾难应急搜索和救援机器人(Search And Rescue Robot)是自然灾害、事故等突发事件发生时,代替搜救人员进入现场执行搜救探测任务的移动机器人。该类机器人可以远程操控或采用自主的方式深入到复杂、危险、不确定的灾害现场,探测未知环境信息,搜索和营救被困者。搜救机器人是机器人技术朝实用化发展的一个重要分支和新的研究领域,具有重要的社会价值。
关键字:
研究 机器人 搜救 井下 煤矿
基于颜色特征的物体识别系统对于不同颜色的分别提取和识别(以上两幅图片由某大学机器人实验室负责人暨机器人天空主编Liu Weichao友情提供)随着计算机科学和自动控制技术的发展,越来越多的不同种类的智能机器人出现在
关键字:
机器人 视觉识别 技术简介
对于移动机器人的开发来说,其大小,重量及性能都非常重要,因此坚固的模块化CompactRIO系统非常适合用于开发。 LabVIEW和NI硬件之间定义良好的兼容性显著地减少了开发者执行系统集成的时间和精力。
关键字:
NI FPGA 机器人
下面给大家介绍一个超声波导航机器人,总共花费了35美刀,为了做着玩意我用了五个小时。下面就是我用到的材料: 六个雪糕棒(有才吧)+木胶 一个老旧的坦克套装 两个改良的迷你伺服电机 需要注意的是你需
关键字:
DIY 超声波 导航 机器人
引言
关键字:
控制 防滑 行走 机器人 海底
电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
关键字:
机器人 DSP 运动控制器
中国哈尔滨工业大学的科学家近日报告说,他们开发出一种可以在水面上行走的微型机器人,在军事侦察、水污染监测等领域具有广阔应用前景。有关研究成果已经刊登在美国《应用材料与界面》杂志上。
领导这项研究的潘钦敏教授告诉新华社记者,他们的研发大致可分为两个阶段。首先是从水黾腿部的“羽毛状”微纳米结构获得灵感,研发了一种“超级浮力材料”,这种新材料的水上载重能力惊人。
在自然界中,水黾等小昆虫可以在水面自由行走而不沉没,其原因是水黾的腿部具有特殊的微纳米
关键字:
微纳米 机器人
“机器人”介绍
您好,目前还没有人创建词条“机器人”!
欢迎您创建该词条,阐述对“机器人”的理解,并与今后在此搜索“机器人”的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473