一直以来科学家都在尝试用机器人代替人完成各种任务,目前已有不少相关产品诞生,但可实现功能还偏简单,机器人特...
关键字:
传感器 机器人 人工智能
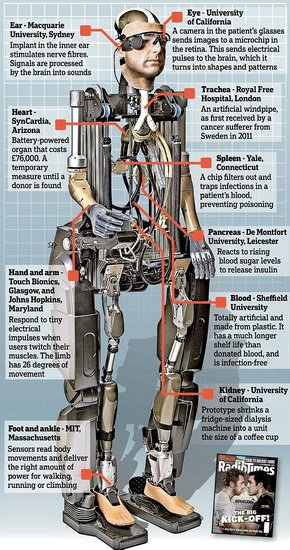
据英国每日邮报报道,目前,科学家花费100万美元打造一个真实的仿生机械人,它是由假肢和人造器官构成的。它被称为“雷克斯(Rex)”,是机械外骨骼仿生人的意思,身高可达到2米,是由从世界各地研制的人造肢体和器官构成。近年来,科学家在先进假肢和人造器官领域的突破性发展,意味着很快不仅能够置换失去的身体器官,还能进一步增强其功能性。
科学家建造的这个仿生机械人“雷克斯”,是由来自世界各地研制成功的人造肢体和器官构成
英国第4频道节目主持人贝
关键字:
仿生 机器人
想像一下如下情节:为了确定你是否患有卒中,你只能被带入医院进行检查。如今,一切都变了,一台5英尺高、可远程遥控的机器人,悄悄滑行到你的身边,在它的屏幕上出现了一张脸,那是你的神经学家,会诊就这样开始了。
听起来好像是天方夜潭,但世上首款医院用自动电视医疗机器人已经获得了美国FDA的510(k)批文。这些机器人正在投入使用。它的应用范围非常广泛,从中风诊断和特护病房预防到手术合作都将出现它们的身影。机器人的作用在于大力改善患者转归、减少医护成本,为患者提供他们能够承担的医疗服务。
位于加利弗
关键字:
InTouch 机器人 RP-VITA
在许多好莱坞大片中,与机器人相关的桥段往往是导演抓人眼球增加票房的成功噱头。然而,在现实的电子制造业,机器人的入侵正实实在在上演着——
在成本压力日增的电脑周边设备行业里,雷柏彻底把自动化设备和机器人变成了工厂里的主角。据悉,目前雷柏工人数量已由2011年的3000人减少到目前的1000人,产能却增加了三倍。
制造业巨头富士康CEO则表示,将在装配线上添加一百万件工业机器人,以实现电子产品的自动化装配。此外,艾美特、华为等大型企业,也在布局添置机器人、推进自动化。
关键字:
富士康 机器人
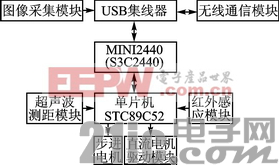
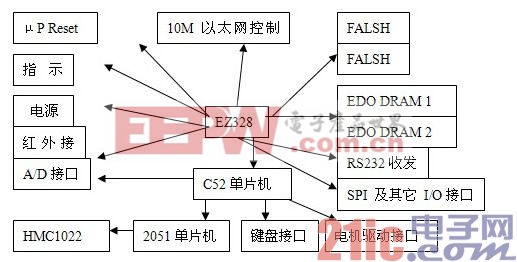
基于H桥控制的移动机器人系统方案,引言近年来随着人工智能技术、计算机技术等相关技术的发展,对移动机器人的研究越来越广泛。本设计是采用OpenWrt操作系统的移动机器人,它可实现多种不同功能,如探测险情、巡视、图像采集、定位、无线通信等。它还可
关键字:
系统 方案 机器人 移动 控制 基于
近日,富士康江西工厂千人罢工,起因缘于工人要求涨薪而未果,于是冲冠一怒、上街游行并阻路。这是富士康大陆工厂在一年时间内爆发的第三次严重罢工,作为国内典型的代工制造企业,富士康再一次为中国制造业转型提供了醍醐灌顶的反面教材。如何广泛利用智能自动的设备代替成本日益上升的人工模式,再次提上各制造工厂的议事日程。
关键字:
富士康 制造业 机器人
北京时间1月9日消息,据国外媒体报道,自从2006年以来,很多东西都发生了改变。社交网络统治了一切。对极客精英来说,智能手机不再是的奢侈品。每一位孩子都知道了“应用程序”这个词。可能正是这些主意推动乐高推出机器人玩具Mindstorm EV3,这是自2006年以来乐高首次对其Mindstorms产品线推出更新产品。Mindstorms是乐高推出的可编程机器人部件,包括一个大脑、多个马达和传感器,可与该公司的 Technic产品对接。
Mindstorms EV3是乐高可编
关键字:
乐高 机器人 Mindstorms
美国麻省理工学院比特和原子研究中心(Center for Bits and Atoms)科学家们模拟蛋白质重叠结构发明了微型机器人,该微型机器人有望在诸如生物医学和航空航天等领域得到广泛应用。据报道,科学家将这个机器人命名为“milli-motein”,这个名字反映了其仅有毫米大小的各部件和它仿蛋白质氨基酸的结构设计。
众所周知,蛋白质是由一长串的氨基酸组成的,而氨基酸的重叠排列构成了其复杂的三维形状。在生物世界,这些复杂的构造能完成大量的任务,如捆绑和运
关键字:
麻省理工 3D 机器人
美国国家仪器公司(National Instruments, 简称NI)携手上海交通大学于2012年12月1日到2日共同举行2012中国机器人大赛暨RoboCup公开赛(上海赛区)篮球机器人比赛。来自全国各地9所高校的9支队伍、共50余名参赛队员代表参加了此次比赛,围绕篮球机器人1大项3小项项目展开竞技。
关键字:
NI 图形化系统 机器人
1 引言
关键字:
方法 适应 模糊 伺服系统 机器人
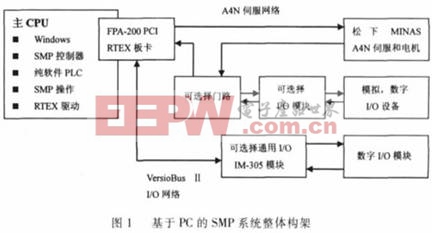
1 引言 随着现代工业的迅速发展, 普通的人工劳动力已经不适合强度高、环境恶劣的工作要求。而随着机器人制造水平的提高, 具有高效率、质量稳定、通用性强的机器人已经受到越来越多的青睐,并被广泛应用到柔性制
关键字:
内核 机器人 控制系统 控制 运动 航空 插头 SMP 采用
北京时间12月11消息,据Theverge网站报道,富士康CEO郭台铭今年6月宣布,富士康计划在整个工厂的组装线部署100万台机器人。此举是富士康在整个公司范围内应有更自动化的生产流程的一部分。富士康一直不愿意讨论实现这个目标的任何进展。但是,据《华尔街日报》报道,这个自动化流程已经在实施之中。有些工人已经开始感受到机器人的影响。
富士康深圳工厂一位姓张的工人在过去的两年里一直在这个工厂工作。他对《华尔街日报》说,在工厂经理开始部署机器人手臂向一个主板插入组件之后,他的一些同事最近已经被调到其它
关键字:
富士康 机器人 自动化
12月11日消息,据华尔街日报报道,苹果供应商鸿海精密曾表示计划在其遍布中国各地的工厂安装机械手臂,以提升生产效率和解决工人骚乱问题。然而,未来十年其自动化生产流程努力将面临诸多重大障碍,如高额成本和快速的技术变革。
鸿海中国工厂的工人总数高达150万,近年已经先后遭遇多起备受关注的事故,从被指聘用童工,到一连串的员工跳楼事件,再到9月一家工厂出现大骚乱。在过去十年间,富士康在中国大陆也新建了工厂,时不时就会面临招工困难。
对富士康来说,自动化iPhone、电视、游戏机等电子设备的生产可谓
关键字:
富士康 机器人 自动化
12月10日消息,日前,爱普生宣布,拟于2012年12月21日发布其全新系列垂直6轴工业机器人,该系列包含C4和C4L两款型号。C4可搬运重量为4kg,且其(负载3kg时)比爱普生2009年7月发布的C3系列同级别速度更快,标准循环时间缩短了20%。长臂型(900mm)C4L的机身纤细灵活,最大化的提升了对空间的使用效率。同时,爱普生还将推出两款新的选配设备,RC700机械手控制器和Vision Guide7.0机械视觉系统。
4S系列紧凑型6轴机器人
C4系列
关键字:
爱普生 机器人 RC700
0 背景机器人玩具控制系统的设计中对方向的控制尤其重要,直接体现了机器人玩具的控制精度和整体效果。在本文中要解决的问题就是控制好机器人的运动方向和球门之间的夹角,让其能够在运行中实时地自我调整,准确地把
关键字:
应用 玩具 机器人 传感器 磁阻
“机器人”介绍
您好,目前还没有人创建词条“机器人”!
欢迎您创建该词条,阐述对“机器人”的理解,并与今后在此搜索“机器人”的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473