一种基于BF561的智能视频监控仪设计

2.2 软件流程
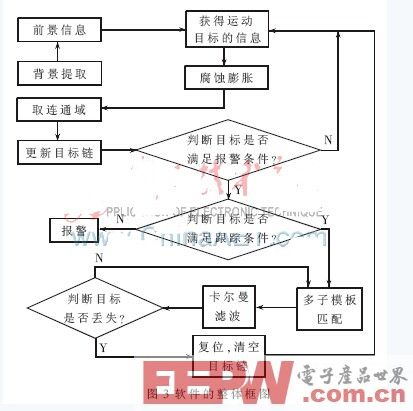
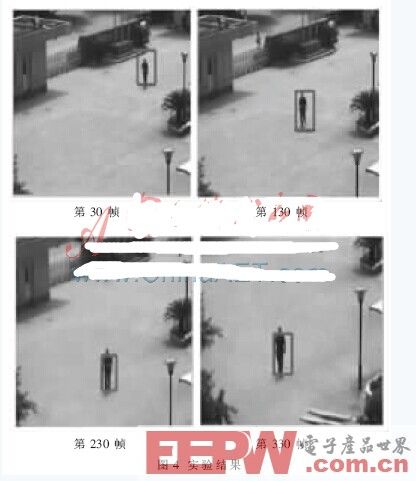
本文引用地址:https://www.eepw.com.cn/article/256885.htmBF561的视频监控处理流程如图3所示。首先BF561收到FPGA传来的1帧图像,接着BF561读取本帧图像的二值化信息,通过腐蚀膨胀函数和取连通域函数target_mark(),得到当前帧运动目标的大小、重心和位置等信息,然后通过target_update()函数更新目标链,采用基于区域的算法,判断连续的各帧之间运动物体的质心位移方向和距离,判断目标的状态,判断是新目标、原有目标、目标发生合并、目标发生遮挡和目标丢失等。完成目标链的更新后,进入规则检测函数rule_check(),根据目标的轨迹信息判断目标链中的目标是否满足报警条件,若满足报警条件,给出各种报警信号,若不满足,则返回,等待下一次循环。通过对物体运动轨迹的记录,可以实现入侵检测,人、车数量统计,遗留物体检测,摄像头非法遮挡和移位报警等功能。若要实时跟踪目标,则进入target_track()函数,采用卡尔曼滤波器对目标位置进行预测和改进的多子模板匹配算法得到目标的实际位置,控制云台运动保证目标的连续跟踪。实验结果如图4所示,表明本设计能准确、实时地跟踪目标。
本设计实现了智能视频监控仪。其独立的硬件设计结构和丰富的接口,使本平台不仅可用于智能化当前监控系统,也可独立构建新的网络化、智能化的监控系统。

模数转换器相关文章:模数转换器工作原理
存储器相关文章:存储器原理







评论