2 多传感状态融合估计算法
单采样率多传感器状态融合估计的研究方法主要有基于概率论的方法、基于Kalman滤波的方法、基于推理网络的方法、基于模糊理论的方法、基于神经网络的方法,以及基于小波、熵、类论、随机集、生物学灵感、Choquet积分的方法等等[2]。基于Kalman滤波的方法由于具有操作简单、计算量小、实时性强等优点,得到最为广泛的研究。
下面重点介绍基于Kalman滤波的分布式数据融合状态估计算法。设多传感器系统有如下形式[3]:
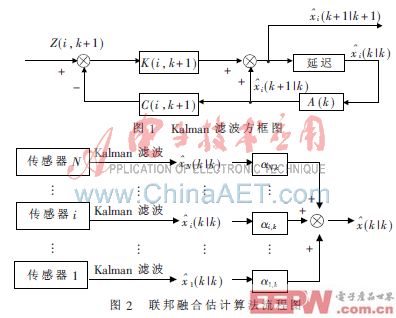
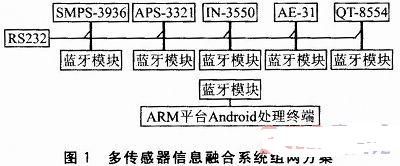
基于第i个传感器信息的Kalman滤波估计器如图1所示。Carlson联邦融合估计算法流程图如图2所示。





评论