基于DSP的混合动力汽车综合显示仪设计

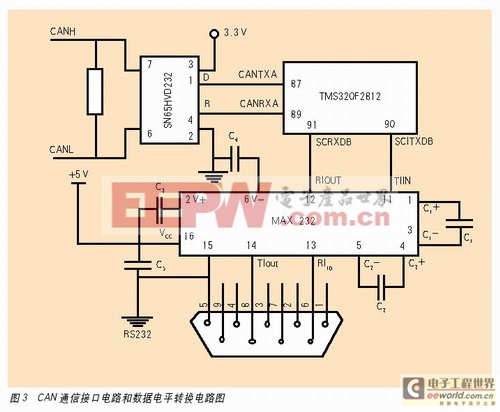
b. CAN通信接口电路与数据电平转换电路
TMS320F2812中集成的CAN总线模块是增强型CAN(eCAN)模块,支持CAN技术规范2.0B,最高达1Mb/s速率,并带光电隔离;在基于TMS320F2812的混合动力汽车综合显示系统中,CAN总线接口是在集成的eCAN模块的基础上,外扩了TI公司的3.3V CAN总线收发器SN65HVD232。由于YD711型彩色液晶智能显示器采用标准RS-232C通信方式CONTROL ENGINEERING China版权所有,系统采用MAX232芯片将DSP输出的典型3.3V电平数据转换为RS-232C电平。CAN通信接口电路与数据电平转换电路如图3所示。
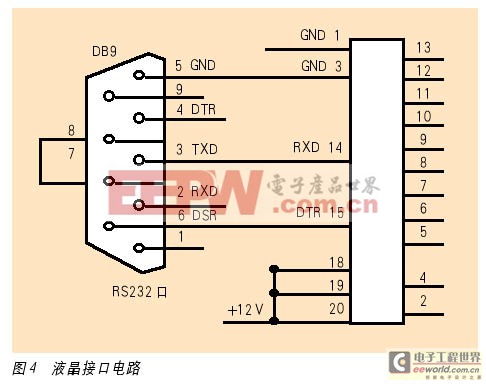
c. YD711液晶接口电路
液晶的移位寄存器RXD(PIN14)通过RS-232C口的TXD(PIN3)与MAX232的T1out(PIN14)连接;液晶的缓冲区寄存器DTR(PIN15)通过RS-232C口的DSR(PIN6)与MAX232的T1in(PIN13)连接,在F2812给YD711发送数据之前,首先应判断移位寄存器是否为空CONTROL ENGINEERING China版权所有,为空时再检查DTR信号,若DTR为高电平,表示缓冲区满,要等到DTR信号变为低电平后再发送数据。即DTR为低电平时发送数据,DTR为高时停止数据发送。接口电路如图3、4所示。
3. 软件设计
编程工具采用TI公司的DSP集成开发环境CCStudio V3.1,采用标准C语言作为程序设计语言,其编译效率和直接用汇编语言已经没有太大的差距。程序主要涉及到eCAN模块、PIE模块和SCI模块的运用:(1)在对各寄存器进行初始化以后,首先启动CAN模块接受数据;(2)判断数据的类型,例如:判断是转速、水温、还是其他,并将数据分别存放到相应的邮箱中;(3)判断数据是否正确,采用"差异判别标志"的方法来识别数据属于本身的正常跃变、还是由于干扰引起的突变,从软件上保证了系统抗干扰的能力。例如:当此次所接收的数据与上次接收的数据相比,存在较大差异时,软件暂时只保留数据而不将其送往液晶显示,并打开一个"差异判别标志",并将所保留的数据再与下一帧数据进行比较,直到相邻几个数据不存在较大差异时,才认为是正确的数据,这时清除"差异判别标志"并由SCI将数据送往液晶显示。
PIE模块用以实现驾驶员按键选择画面部分的功能。当有按键触发信号产生,主程序跳转至中断服务子程序ISR中,判断选择的是哪幅画面并将其显示,中断子程序返回至主程序。
4. 显示界面设计及参数范围











评论