基于ADRC的井下机器人运动控制技术

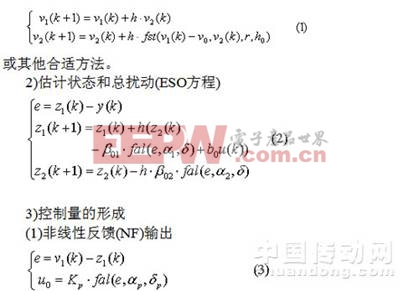
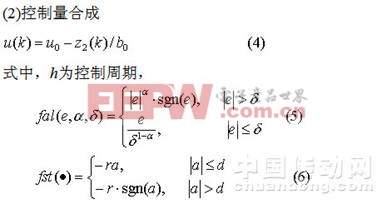
ADRC的离散算法
将上述理论进行离散化后可得ADRC各环节的离散化公式如下:
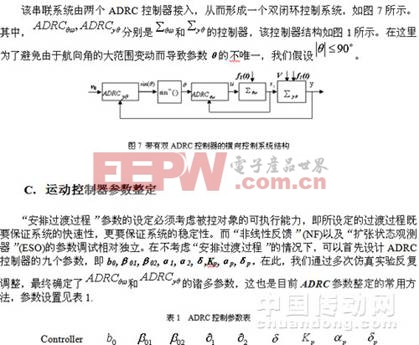
安排过渡过程
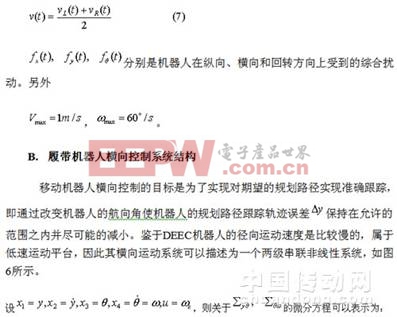
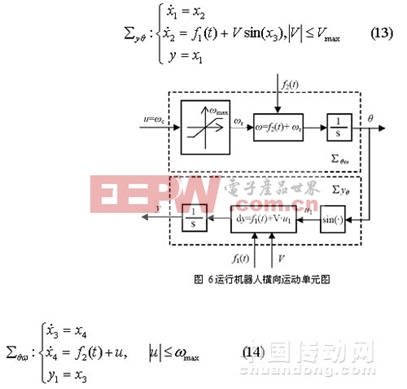
3.2DEEC机器人横向运动控制器设计
DEEC机器人运动学方程
DEEC机器人采用3台Maxthon大功率直流有刷电机,一台用于驱动履带臂,两台驱动左右履带轮。机器人的最大移动速度为1m/s,最大回转速度为60°/s,可以实现零半径转弯,也可以按制定半径转弯。由于本节主要分析车体的横向运动,所以不考虑履带臂的影响,建立的模型只考虑左右两履带轮。为了使机器人有更大的智能性,我们对其进行建模。为进行横向控制,我们模型基础上开发相应的控制算法。
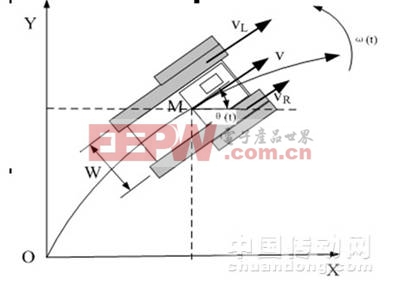
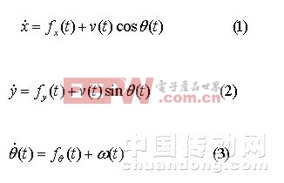
机器人模型运动曲线如图5所示。图5中,XOY为地球固连参考坐标系,为右手坐标系;坐标O为机器人的运动起点;机器人经过时间t,从O点运动到M点(机器人的几何中心的移动)。由此可以推导出如下关系式:

结束语
ADRC技术在DEEC机器人运动控制器设计中发挥了重要作用,本文在此基础上详细阐述了DEEC机器人横向控制器的设计,并对运行参数进行了整定,得到了较好的控制效果。

评论