基于ADRC的井下机器人运动控制技术

如今,自抗扰控制器已经经历了30多年的发展历程。由于该控制器算法简单,参数适应性广,是解决非线性、不确定性、强干扰、强耦合、大时滞等控制问题的一种有效方法,具有较强的适应性、鲁棒性和可操作性,越来越多的科研工作者加入到自抗扰控制算法的研究行列中。目前,自抗扰控制器已经在电机控制、过热汽温控制、动力调谐陀螺仪、单级旋转倒立摆、机器人控制、大射电望远镜舱位姿态控制、飞行器姿态控制、船舶减摇鳍等诸多领域得到应用,并取得了良好的控制效果。
研究自抗扰控制器在船舶航向控制系统中的应用,不仅可以拓展自抗扰控制器的应用领域,而且可以有效的提高船舶的控制品质,具有很好的研究意义。
3DEEC机器人横向运动自抗扰控制器设计
3.1二阶系统自抗扰控制器的一般形式
很多被控对象可以简化成如下形式:
其中,w为对象外部扰动,u为控制量,b(t)为控制量放大系数,y为输出, f(x,w,t)是对象“总扰动”。对于该一阶对象,其ADRC控制器的标准结构一般如图1所示。
图1 ADRC控制器的标准结构
由图1可见,ADRC由三部分组成:“安排过渡过程”,“非线性反馈(NF)”和“扩张状态观测器(ESO)”。图中,v0为控制目标,v1是v0的跟踪信号;z1是系统输出y的估计,z2是对象总扰动f(x,w,t)的估计;e是误差,u0是NF的输出,b0是b(t)的估计。
Ø 安排过渡过程:
在一般的控制系统中,误差直接取成:
e = v - y
式中, v 为设定值; y 为系统输出。
误差的这种取法使初始误差很大,易引起“超调”,很不合理。根据对象承受的能力,我们先安排合理的过渡过程v1 ( t ) , 然后误差取成e =v1(t)-y,这是解决PID 的“快速性”和“超调”之间矛盾的有效办法, 也是提高调节器“鲁棒性”的一种办法。
在实际工程问题中,常存在由不连续或带随机噪声的量测信号合理地提取连续信号及微分信号的问题。过去采取的是线性微分器及线性滤波手段,但是仍不能满意解决问题,跟踪微分器就是利用非线性函数来实现对输入信号广义导数的一种光滑逼近。
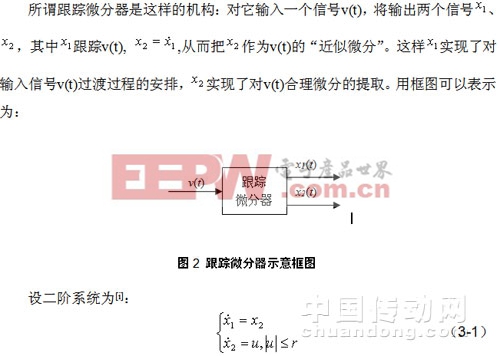

跟踪微分器就是一个信号处理环节,自抗扰控制器主要是充分利用了它的跟踪特性和提取微分信号的特点,实现了对输入信号过渡过程的安排及微分信号的提取。特别地,当输入信号发生突变时,跟踪微分器可以为控制器提供光滑的输出信号作为输入,使控制量输出连续地变化,不会因为输入的突变而产生超调,增强了系统的稳定性。跟踪微分器给出了闭环系统的一种可以实现的动态性能指标,这种给定对于被控对象来说不再是一种稳态的期望值,而是一种可实时跟踪的曲线。同时,在输入信号存在外界扰动时,跟踪微分器还可以实现滤波的作用。

评论