基于ADRC的井下机器人运动控制技术

扩张状态观测器
扩张状态观测器是韩京清于1995年提出的一种新型状态观测器,它能跟踪系统的各阶状态变量,估计系统未建模动态和系统外扰的总作用量,同时对系统的未建模动态和外扰进行补偿,利用非线性环节实现了对非线性系统的动态反馈线性化,是自抗扰控制器的核心。
对于系统方程
以看到,式(3-19)形式相同,即扩张状态的前馈补偿将非线性不确定系统转化为线性系统标准型:积分串联型。
可见,扩张状态观测器将被控系统中含有的非线性动态、模型不确定性及外部扰动等都视为扩张状态加以实时观测、估计,利用前馈环节对扩张状态观测值进行补偿,实现了非线性系统的反馈线性化。
对于二阶系统

非线性误差反馈
首先介绍一下非线性函数fal。在实际控制工程界,常用到经验知识:“大误差,小增益;小误差,大增益”。而非线性函数函数
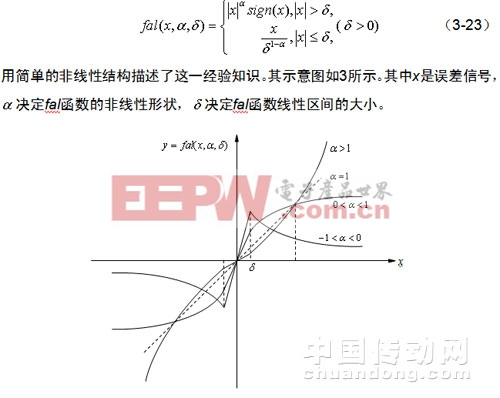
图3 非线性函数fal示意图
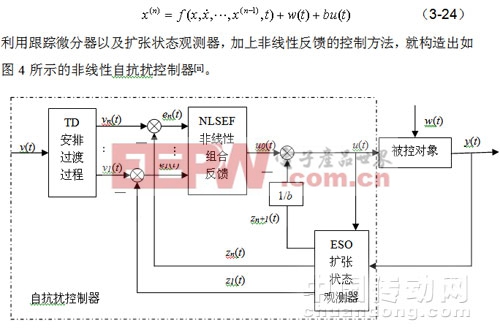
图4 自抗扰控制器的结构图

由此,得到了自抗扰控制器的三个组成部件:跟踪微分器(TrackingDifferentiator,TD),扩张状态观测器(ExtendedStateObserver,ESO)和非线性误差反馈(NonlinearStateErrorFeedback,NLSEF)。其中,跟踪微分器TD的作用是安排过渡过程,实现对系统输入信号的快速无超调跟踪,并给出良好的微分信号。扩张状态观测器ESO用来估计系统状态、模型和外扰,是自抗扰控制器的核心部分。扩张状态观测器把有未知外扰的非线性不确定对象反馈化为“积分器串联型”以后,就可以设计出理想的基于“状态误差反馈”控制器。对“状态误差反馈”采用合适的合适的“非线性配置”,就实现了非线性状态误差反馈控制律。其中扰动的自动估计与补偿正是最为关键的一环,“自抗扰控制器”也因此而得名。

评论