高可靠性末端效应器控制系统设计

1.2.3 控制系统硬件各个模块的实现方案
1)PWM控制电路实现
本系统的电机调速主要考虑采用PWM(脉宽调制)调速。调压调速是无刷直流电机目前最常用的一种调速方式,主要是通过改变加在电机电枢绕组两端的电压来改变电机的转速,这种方法通常将电机的电压由额定电压向下调节电枢电压,达到使电机转速由额定转速变为向下调速,这种调速方法调节的过程中损耗的能量小,且转速过程中系统波动比较小,静态的稳定性较高,响应速度快。是当前无刷直流电机应用最常见的、运行最稳定、最有效的调速方式,它通常有PWM调节方式、旋转变流机构调节方式以及静止变流机构调节方式。目前无刷直流电机无级调速系统也大多都采用调压调速中的PWM调节方式。
PWM调节方式是一种根据能量转换等效原理,是由将固定不变的系统电压斩截成占空比可变的PWM波,经过改变占空比来实现电机电枢两端平均电压的电压调节方式,这种调节方式的特点具有体积小、凋速性能好、成本低、控制方便等优点,与此同时,它也比较容易与控制器之间构成闭环控制系统,控制方法也显得灵活多变。因此,我们采用PWM调压调节方式。在本系统中PWM脉冲波的产生是直接通过DSP的PWM口得到。
2)驱动电路设计
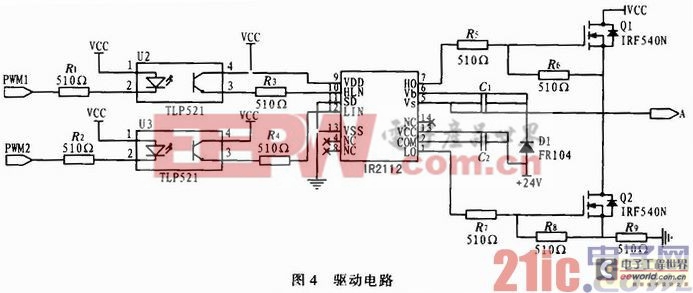
对于末端效应器系统,驱动电路部分采用专门的集成的驱动模块结合MOSFET实现。为了避免和DSP之间产生干扰,增强可靠性,采用光电隔离模块和集成驱动模块共同构成驱动电路来驱动功率MOSFET管。如图4所示,由光电隔离模块和IR2112模块组成的驱动A相桥臂的连接方式。光耦部分起到隔离和电平转换的作用。驱动三相全桥电路需要6路PWM信号,而IR2112只能同时输出2路PWM信号,所以驱动电路共需要3片IR2112芯片。
3)电流检测和速度检测电路
电流检测电路就是将电机的三相电流进行数模转换器采集,然后反馈到主控制器,与控制芯片内的速度控制器产生的电信号做比较,完成对电机的电流闭环控制。本控制系统中实际的电流比较小,功率也比较小,因此采用了一个旁路电阻来检测实际电机的相电流的大小,电阻位于三相功率变换全控的电路的桥臂和地线之间。
速度检测电路是控制系统中最重要的环节。速度检测电路检测电机的实际转速并且将检测的实际速度信号转化为电信号直接传送到控制芯片的引脚,然后在主控制器内完成对转速的计算并且和电机的预定转速作比较完成回路系统。
本系统利用控制器的计算处理能力,采用霍尔位置传感器的信号来计算无刷直流电机的转速。
2 末端效应器控制器可靠性及长寿命设计
在第一章节中末端效应器的详细设计中控制器的设计包括任务级执行级控制方案、具体软硬件实现中元器件选择及实现方案等都是以高可靠性为中心进行分析和设计的。下面主要从软硬件的角度考虑故障的处理方法,还有容错控制策略的设计。
2.1 软硬件可靠性保证
2.1.1 硬件可靠性保证
解决可靠性问题最主要的方法是执行器故障诊断和处理。常见电机故障有:
1)电机过载、过流。由于系统的电流比较小,故可以采用主回路串联采样电阻的方法进行过流检测。定子电流经过电阻之后转变成电压信号,在此串入小电阻,小电阻两端的电压经过放大隔离后送入A/D单元,通过主控制器的软件编程或逻辑实现对电机的过载保护。
2)电机过速。
3)驱动器非正常复位。本系统采用了硬件冗余,设计了急停电路,使系统停止运行。
另外光电编码器等传感部件也可能发生故障。在系统运行时可能出现的故障有:
1)数据传输错误。诊断办法是采用奇偶校验法判别,然后用线性外推法给出当前传感器数据;
2)数据采集错误。这种故障可能造成控制力矩的波动,诊断采用野点剔除的办法加以剔除,然后用线性外推法给出当前传感器数据。
2.1.2 软件可靠性保证
1)系统启动自检。在启动系统时,必须检测元器件是否正常工作。
2)系统故障报警和处理。当有故障发生时,软件能检测出该故障,并诊断其故障类型,从而做出必要的处理。
3)事故急停处理。当一旦有事故发生时,系统应该立即关闭,力求将事故对系统的破坏降低到最低程度。
2.2 高可靠性独立控制系统的合理容错控制策略设计
空间站远程遥操作机械臂SSRMS(Space Station Remote Manipulator System)、欧洲遥操作机械臂ERA(European Robotic Arm)、日本实验舱遥操作机械臂JEMRMS(Japanese Experimental Module Remote ManipulatorSystem)在设计和运行过程中都要求机械臂系统至少能够容忍两次故障的发生。这对末端效应器控制系统也提出了一个新的要求。控制系统的容错设计及故障检测与诊断是提高航天器的可靠性的有效途径。
末端效应器控制系统除了提高单一控制系统的高可靠性之外,考虑采用控制系统的容错也是提高可靠性的一个合理的选择。同时对于一个精密的运动控制系统来说,系统的容错性是调试和运行时需要考虑的功能完整性问题。对于控制系统的容错设计主要考虑以下两方面的要素:
1)需要结合具体的任务,选择合适的传感器、执行器和控制器备份策略:
2)需要考虑与之相配合的故障诊断和诊断方法。
对于传感器、执行器和控制器备份方案,本系统了采用类似于ERA的关节控制系统,即采用双绕组永磁同步电机构建相互独立的2套驱动子系统,但是由于2套驱动系统工作在冷备份模式,容错能力不高,且没有充分利用冗余备份的传感器资源,所以为了提高容错能力,本系统选择了双绕组余度电机工作在热备份模式。
由于末端效应器机械机构具有模型非线性、摩擦非线性和负载变动的自适应等因素,本系统的故障检测和故障诊断主要是基于传感器冗余信息的故障检测方法,主要通过位置传感器、力传感器的信号来推断系统的状态,进而进行故障检测。位置信息的配置主要包括电机数字霍尔传感器、电机旋转变压器等多级容错备份和故障检测。力传感器的故障通过计算电机位置信息和参考力进行比较来判断。
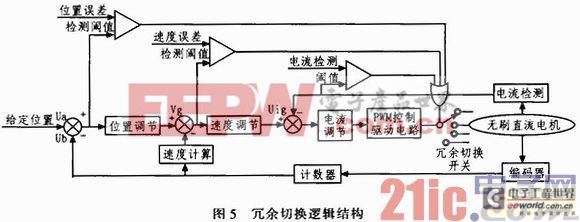
结合实际情况,本控制系统的电机驱动控制部分容错设计主要采用了双绕组余度电机工作在热备份模式。相应的故障检测方法为基于传感器冗余信息的故障检测方法。具体的冗余切换逻辑结构如图5所示。
3 结论
末端效应器机械机构在空间环境中稳定可靠性的工作,作为其核心的电机控制系统的长期稳定可靠的工作就显得尤为重要。因此文中首先考虑完成任务的运动规划问题,然后考虑了控制系统方式及其软硬件实现的具体要求.来实现高可靠性独立控制系统的设计。并且在高可靠性独立控制系统的基础上,还设计了合理的容错控制策略。此系统经过实验,达到了设计要求。

陀螺仪相关文章:陀螺仪原理













评论