基于SABER软件的数字控制电源系统的仿真设计

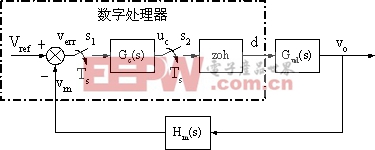
图2 控制系统框图
3.2 数字化控制算法的仿真设计
模拟部分的建模较为简单,只要根据已设计好的实际电路在仿真元件库中选取相应元件,并作必要的设置即可。对于数字控制部分,由于数据处理过程是离散化,为了充分模拟这一过程,可采用编程化的控制算法仿真设计。
首先对控制算法进行分析,因为它是控制电路的重要一环,也是构成闭环的关键。本例中控制算法采用PI算法,因为它简单可靠,在工程实践中有广泛的应用。如果采用其它的控制算法,也可以用下面的方法类似地得出相应的控制算法框图。
模拟系统中,PI控制算法的表达式为
 (1)
(1)
式中u(t)为调节器的输出信号,即控制量;e(t)为基准与采样值的偏差信号;Kp为比例系数;TI为积分时间常数。由于数字控制系统是一种采样控制系统,只能根据采样时刻的偏差计算控制量,因此,为使PI控制适用于数字控制系统,应将上述表达式离散化为
 (2)
(2)
该式称为PI调节的位置式PI控制算法[4]。令 (称为积分系数),则可以得到离散化的位置式PI控制算法的编程表达式为
(称为积分系数),则可以得到离散化的位置式PI控制算法的编程表达式为
 (3)
(3)
令 ,则表达式(3)可以改写为
,则表达式(3)可以改写为
 (4)
(4)
当实际的数字控制系统出现开机或停机等大幅度变动时,系统输出会出现较大偏差,经积分累积后,该算式中的积分项容易出现积分饱和,导致控制效果变差,因此在积分项中加入抗饱和项,即
 (5)
(5)
其中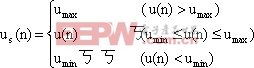 ,Ksat为抗饱和积分系数。[5]当控制量偏高时,积分项在原来的基础上减去一定数值,该数值与控制量的计算值和上限之间的差值有关;相反,则加上一定数值,该数值与控制量的计算值与下限之间的差值有关,从而有效地抑制积分饱和。
,Ksat为抗饱和积分系数。[5]当控制量偏高时,积分项在原来的基础上减去一定数值,该数值与控制量的计算值和上限之间的差值有关;相反,则加上一定数值,该数值与控制量的计算值与下限之间的差值有关,从而有效地抑制积分饱和。
考虑到表达式的可实现性,将积分项改为前一次的积分结果,从而得到下面的表达式
 (6)
(6)
由表达式(4)、(5)和(6)可以得出图3所示的PI计算框图。输入量为基准值与本次采样值之间的误差,输出量为带有抗饱和环节的PI计算输出。该框图将作为仿真电路控制部分建模的主要依据。
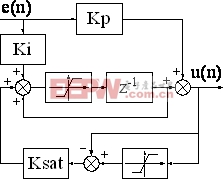
图3 PI计算框图






评论