1引言
常用的开关电源的闭环系统,一般是以DC-DC变换器的线性平均模型为基础,构造PID控制器对系统行为进行调节。然而,DC-DC变换器的开关特性决定了它本质上是一个非线性系统,因此基于线性平均模型构造的控制系统,不能保证DC-DC变换器可以稳定工作在大负载范围内[1]。
Boost变换器是一种在工业中得到广泛应用的DC-DC变换器,例如开关电源中的功率因数校正环节,光伏逆变器中的最大功率点跟踪MPPT环节等。然而,Boost变换器的交流小信号模型传递函数存在着右半平面零点,使得常规的单电压闭环反馈线性控制会产生稳定性问题,难以得到满意的效果。
滑模变结构控制属于变结构控制的一种。最早的滑模控制应用于军事领域,用来解决导弹的姿态问题和火炮随动系统的控制问题。它的研究始于对动力学系统的研究。自从滑模控制理论面世以来,它以其特有的优异特性,如对系统内部参数不确定性不敏感,很强的抗扰动特性等,引起了学界广泛的关注。
2Boost变换器的状态空间模型
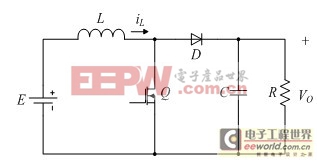
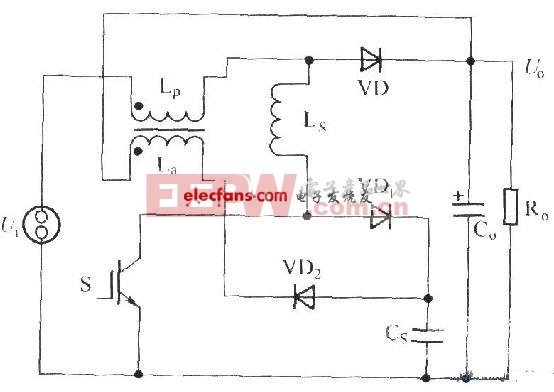
图1Boost变换器拓扑结构
Boost变换器的拓扑结构如图1所示。Boost变换器根据电感电流的状态,分为电感电流连续(CCM)和电感电流断续(DCM)两种工作模式。电感电流连续是指在一个开关周期内,电感电流永远不会为零。在电感电流连续模式下,Boost变换器有两个工作模态[2]:
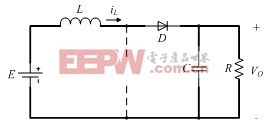
①开关管Q开通时,电源E向电感L储能,不向负载提供能量。输出端电容C向负载提供能量。电感电流iL线性增加。如图2(a)所示;
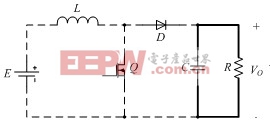
②开关管Q断开时,电源和电感同时向负载提供能量,并且为电容充电。电感电流iL线性减少。由于电感L向外提供能量,所以电感两端电压反向。如图2(b)所示。
工作于CCM模式下的Boost变换器可以被描述为:
 (1)
(1)
其中u为符号函数,表征了开关状态。u=0开关管关断,u=0开关管开通。

(a)
(b)
(c)
图2Boost变换器的工作模态:(a)工作模态1:Q导通;(b)工作模态2(a):Q关断;(c)工作模态2(b)Q关断,电感电流断续。
pid控制器相关文章:pid控制器原理



评论