MEMS传感器在移动设备上的应用介绍

对于消费电子产品,室内行人航位推算系统5%的行进距离误差通常是可以接受的。例如,当一个人走过100米的距离时,定位误差应该在5米范围内。这要求航向误差在 ±2°到±5°之间[2]。例如,如果航位误差是2°,当一个人走过100米的距离时,定位误差应该在3.5米范围内 [= 2*100m*sin(2°/2)]。
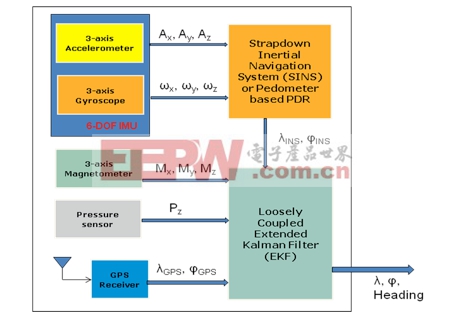
此外,MEMS压力传感器能够测量相对于海平面的绝对气压。因此,MEMS传感器可以确定手机用户在海平面以下 600米到海平面以上 9000米之间的高度,辅助GPS的高度测量[2]。图3所示是利用MEMS传感器与GPS接收器的行人航位推算系统结构图。
图 3: 移动设备行人航位推算系统结构图
3. MEMS传感器整合
传感器整合是一套数字滤波算法,用于修正每个独立传感器的缺陷,然后输出精确的响应快速的动态的(俯仰/滚转/偏航)姿态测量结果。传感器整合的目的是把每个传感器的测量数据作为输入数据,然后应用数字过滤算法对输入数据进行相互修正,最后输出精确的响应快速的动态的姿态测量结果。因此,航向或方位不受环境磁干扰的影响,没有陀螺仪的零偏漂移问题。
能够修正倾斜度的数字罗盘是由一个3轴加速度计和一个3轴磁力计组成,可提供以地球北极为参考的航向信息。但是这个航向信息容易受到环境磁力的干扰。如果安装一个3轴陀螺仪,开发一个9轴传感器整合解决方案,则可以随时随地保持精确的航向信息。
在设计一个使用多个MEMS传感器的系统时,了解下表所列的每个MEMS传感器的优缺点是很重要的。
•加速度计:在静态或慢速运动状态下可用于倾斜度修正型数字罗盘;可用于计步器的检测功能,检测步行人当前的状态是静止还是运动。不过,当系统在3D空间静止时,加速度计无法区分真正的线性加速度与地球重力,而且容易受到震动和振荡的影响。
•陀螺仪:可以连续提供从系统载体坐标到局部地球水平坐标的旋转矩阵,当磁力计受到干扰时,陀螺仪可辅助数字罗盘计算航向数据。长时间的零偏漂移导致无限制的姿态和定位错误。
•磁力计:可计算以地球北极为参考方向的绝对航向,并且可用于校准陀螺仪的灵敏度,但容量受到环境磁场的干扰。
•压力传感器:在室内导航时,压力传感器可告诉你身处哪一楼层,辅助GPS计算高度;当GPS信号变弱时,辅助GPS提高定位精度,但是容易受到气流和天气状况的影响。
基于以上各方面考虑,卡尔曼滤波器是最常用的整合不同的传感器输入信息的数学方法。这种方法权衡不同的传感器的作用,给性能最高的方面最高权数,因此,与基于单一媒介的导航系统相比,卡尔曼滤波器算法的估算结果更精确可靠 [3]。
目前基于四元数的扩展型卡尔曼滤波器(EKF)是一个很受欢迎的传感器整合方案,因为四元数只有4个元素,而旋转矩阵有9个元素,此外,四元数法还避免了旋转矩阵的特殊问题 [3]。
4.结论
随时随地精确定位是增强实境等先进移动应用面临的主要挑战,因为增强实境与行人航位推算(PDR)或定位服务(LBS)的关系密切。鉴于GPS接收器的接收限制,MEMS传感器对室内行人航位推算应用很有吸引力,因为这些传感器大多数已经出现在智能手机内。
要想取得5%的室内行人航位推算定位误差,需要开发MEMS传感器整合算法,以修正每个传感器的缺陷,使这些传感器实现优势互补。随着MEMS传感器的性能不断提高,在不远的将来,与用户无关的SINS/GPS一体化导航系统将会成为智能手机的标准配置。
5.参考文献
1.A. Lawrence, Modern Inertial Technology: Navigation, Guidance, and Control, ISBN: 978-0387985077 (hardback), 0387985077 (electronic), 1998
2.STMicroelectronics, Inc.
J. Esfandyari et al, MEMS Pressure Sensors in Pedestrian Navigation, Sensors Magazine, Dec. 2010
http://www.sensorsmag.com/electronics-computers/consumer/mems-pressure-s.。.
3.Greg Welch, Gary Bishop, An Introduction to the Kalman Filter, University of North Carolina at Chapel Hill
4.A. Sabatini, Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing, IEEE transaction on biomedical engineering, Vol. 53, No. 7, July 2006
http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=1643403
6.缩略语
A-GPS – 辅助全球定位系统
API – 应用编程界面
DGPS– 差分全球定位系统
EKF – 扩展型卡尔曼滤波器
GPS – 全球定位系统
LBS – 定位服务
LCD – 液晶显示屏
MAR – 手机增强实境
MEMS– 微机电系统
PDR – 行人航位推算
SDK – 软件开发工具
SINS – 捷联式惯性导航系统
UI– 用户界面

传感器相关文章:传感器工作原理
加速度计相关文章:加速度计原理










评论