直流电机优化控制系统设计(一)

(也即励磁电流)成反比。这种调速方法在额定电压和额定电流下,不同转速时,电机始终可以输出额定功率,因此这种方法也称恒功率调速。
2.2 PWM可逆控制
PWM可逆控制属于改变电枢电压调速中的一种。自从全控型电力电子器件问世以后,采用脉冲宽度调制(PWM)的高频开关控制方式形成了PWM电机调速系统,与传统的V-M(晶闸管-电动机调速)系统相比,表现出较大的优越性:(1) 主电路线路简单,需用功率器件少;(2) 开关频率高,电流容易连续,谐波少;(3) 调速性能好,调速范围大,低速性能好,稳速精度高;(4)效率高,由于功率器件工作在开关状态,导通损耗小。由于有上述优点,直流电机PWM调速系统的应用日益广泛,特别是在中小功率的高动态性能系统中,已完全取代了V-M系统。为实现电机的正反转,需采用可逆PWM变换器,其主电路有多种形式,最常用的是桥式(也称H桥)电路。如图2-1所示:
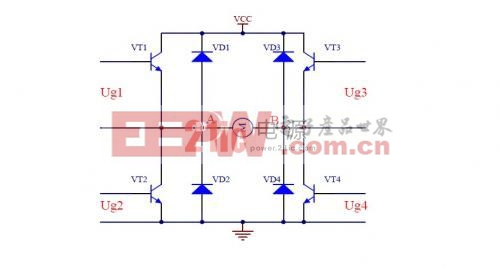
图2-1 桥式可逆PWM变换器
电机M两端电压UAB随开关器件驱动电压极性的变化而改变,其控制方式有双极式、单极式、受限单极式等多种。
双极性驱动H桥时有关波形如图2-2所示:
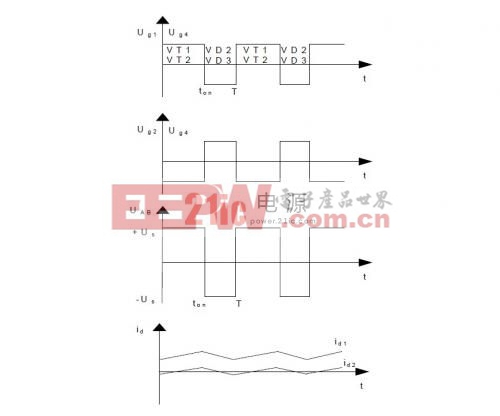
4组驱动电压关系为:Ug1=Ug4=-Ug2=-Ug3,在一个开关周期T内,当0≤t
在电流波形中,id1相当于一般负载的情况,脉动电流的方向始终为正;id2相当于轻载情况,电流可在正负方向之间脉动,但平均值为正,等于负载电流。
当ton>
,时,UAB的平均值为正,电机正转,反之则反转;如果正负脉冲宽度相等,则平均电压为0,电机停止。

陀螺仪相关文章:陀螺仪原理











评论