直流电机优化控制系统设计(二)


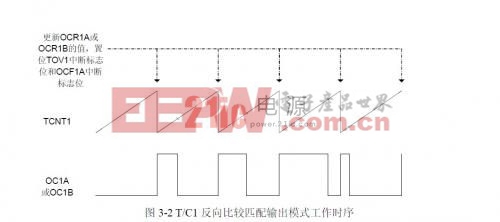
fCLK_IO 为时钟频率,为8MHz,取N=1,即不对时钟进行分频,TOP 值代表CNT1 计数的最大值,跟PWM 位数有关,当选择8 位快速PWM 模式时,TOP=255,则输出频率为31.25KHz;选择9 位快速PWM时,TOP=511,则输出频率为15.6KHz,综合比较,选择9 位快速PWM 输出模式,能同时满足频率和精度的要求。频率确定后,还需确定占空比(波形)。引脚OC1A 或OC1B 的输出波形取决于触发器OC1A 或OC1B。在T/C1 设置成反向比较匹配输出模式下时,若TCNT1 中计数值和OCR1A 或OCR1B 中比较值匹配相等时,OC1A 或OC1B 触发器被清零,OC1A 或OC1B 引脚输出低电平;若TCNT1 中计数值继续计数到TOP 值并由此而返回0000H,则OC1A 或OC1B 被置位,OC1A 或OC1B 输出高电平。工作时序如图3-2 所示。当TCNT1 中的计数值达由TOP 值变为0000H 时,T/C1 产生溢出中断,置位中断标志位TOV1,若中断是开放的,则MCU 会立即转入相应中断服务程序。TOV1 也由硬件自动清零,向该标志位写”1”则由软件清除该标志位。在中断服务程序中改变OCR1A 的值,则其PWM 波形占空比会发生相应变化 。图3-2 T/C1 反向比较匹配输出模式工作时序本系统中,我们只需要一路PWM 信号即可,这里用OC1A 引脚产生,采用9 位快速PWM 模式,频率为15.6KHz,当要改变输出占空比时,改变OCR1A的值即可。
3.2.2 驱动信号形成及死区发生
H桥要由4 路其中两路反向的波形来驱动,因此需将PWM 波形进行反向处理。此外,还需加入防止H 桥上下臂直通的延时电路。如图3-3 所示。
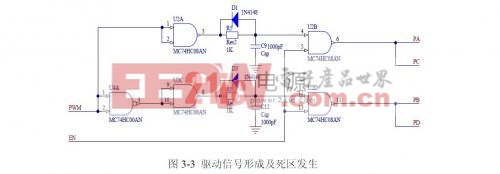
EN 为PWM 输出使能信号,当EN 为低电平时,封锁输出与门,输出全为低电平,电机停转。同时输出与门也起着整形的作用。PWM 信号一路直接输入与门,另一路经反向后送入与门,增加其驱动能力。D1、R5、C9,D3、R9、C12构成死区发生,利用阻容充电,使波形缓慢上升,再利于与门的阈值电压(VCC/2,这里为2.5V)对波形进行整形。下降沿时,电容通过二极管进行快速放电,这样就行成了导通延时。各点波形如图3-4 所示。更新OCR1A或OCR1B的值,置位TOV1中断标志标志位TCNT1OC1A或OC1B死区时间为△t,对MOSFET,死区时间可取0.2-1μs。本文将R5 和R9 用可变电阻代替,将死区时间设为500ns。
经过该电路处理后,一路PWM 信号变成4 路PWM 信号,其中PA、PC 同相,PB、PD 也同相,这两组信号互为反相且存在死区。
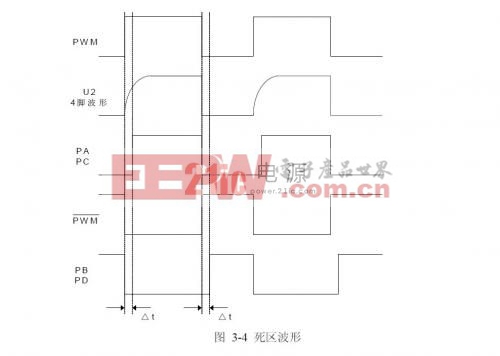
图 3-4 死区波形

陀螺仪相关文章:陀螺仪原理











评论