直流电机优化控制系统设计(四)

3.6 转速及电流检测
3.5.1 光电编码器测速原理
本文使用的电机轴上自带了增量式光电编码器HEDS5500-100,当码盘转动时,它的输出信号是相位差为90°的A相和B相脉冲号。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。波形原理图如图3-10所示。

图3-10 光电编码器顺时针旋转时的输出波形
顺时针旋转时,A相超前B相90°。逆时针旋转时,B相超前A相90°。根据两相相位关系即可判断出电机的旋转方向。查阅该光电编码应用手册可知道,光电编码器轴旋转一周时,各相均输出100个脉冲,根据该特点,可在一定时间内对编码器输出脉冲进行计数,经计算便可得到转速。光电编码器与ATmega16的接口如图3-11所示。
转向鉴别电路由D触发器74LS74构成,当A超前B时,D触发器输出为高电平;当A滞后B时,D触发器输出低电平。根据D触发器Q端的电平高低,即可判断电机正转和反转。将A和B相中的一相脉冲(图中为B相脉冲)送到ATmega16的T0定时/计数引脚进行计数,采用定时器T2进行定时,从而计算出电机转速。
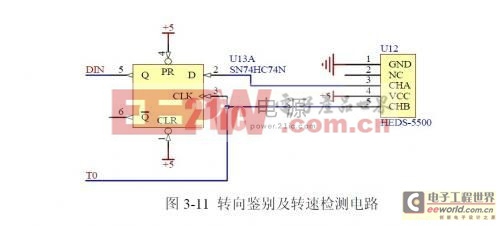
图3-11 转向鉴别及转速检测电路
3.5.2 电流检测
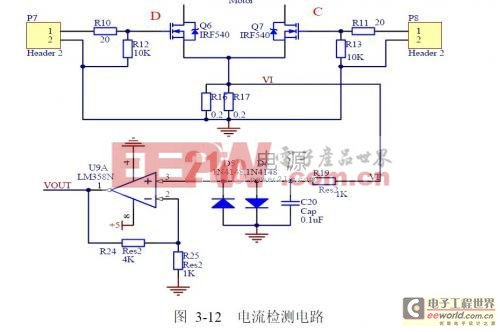
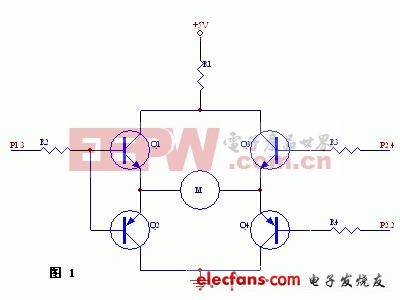
在H桥回路中串入采样电阻,电流流过该电阻时产生压降,通过检测该电压,即可计算出电机中的电流。若该电阻取得过大,则会影响H桥下臂的驱动电压,取得过小,不利于提高检测精度。这里我们取0.1Ω,当电机工作在额定状态时,电流约为5A,此时,压降为0.5V,再将该电压放大5倍后,送入ATmega16的A/D转换通道0。电流检测电路如图3-12所示。Vout接ATmega16的PA0脚即ADC0进行A/D转换。电阻的功耗为:PR耗=I2R=52×0.1=2.5W。
选择0.1Ω,5W的电阻即可满足要求。R19与C20构成滤波电路。电机启动时电流很大,此时运放输入电压也较大,为保护运放不受损坏,加入二极管D5与D6,对输入电压进行限幅。A/D检测电压V测与实际电流I关系为:V测=I×0.1×5(V)=0.5I(V)。





评论